En la era de la inteligencia artificial y el procesamiento del lenguaje natural, la privacidad y seguridad de los datos personales son preocupaciones crecientes. Este artículo explora cómo se entrenan los modelos de IA, los riesgos asociados al uso de datos personales, y cómo OpenAI aborda estas preocupaciones con opciones de privacidad mejoradas, permitiendo a los usuarios decidir si sus datos se utilizan en el entrenamiento de futuros modelos.
La IA está transformando la creación de contenidos, generando dilemas sobre derechos de autor y autoría. Este artículo explora el debate, casos de estudio y propone soluciones para fomentar la colaboración entre humanos y tecnologías de IA en la era digital.
La clave para un futuro exitoso en la intersección de la inteligencia artificial y las redes sociales radica en el equilibrio adecuado entre los beneficios y los desafíos, así como en la colaboración entre todos los actores involucrados. De este modo podremos garantizar un entorno digital seguro y positivo para todos, al usar la Inteligencia artificial en redes sociales.
En la vida cotidiana, ¿Cuántas veces nos ocurre que preguntamos a una persona qué tal está, y la respuesta es positiva mientras que su rostro indica lo contrario? ¿Cuántas veces has ido a la peluquería y has pretendido salir contenta cuando realmente, no te gustaba el resultado final? ¿Alguna vez has querido recibir el feedback de miles de personas en una conferencia o en el transcurso de ella?
Frase de Carl Rogers
Si nos ponemos a reflexionar sobre las cuestiones mencionadas, probablemente nos daremos cuenta de que muchas veces se miente cuando se tratan las emociones, ¿pero nuestra cara también miente?
Definición del problema
Muchas veces se da más importancia a lo que se dice con la voz, que a lo que se dice con la expresión facial, siendo más fácil mentir o esconder la realidad con la primera de ellas. Con este proyecto queríamos, además de desplegar un proyecto real de inteligencia artificial, hacer algo que pudiese ser útil, pudiese detectar las emociones de las personas según su cara, mediante una imagen o la detección de la cara con una webcam. Las emociones surgen cuando ocurre algo relevante. Aparecen rápidamente, de forma automática, y hacen cambiar nuestro foco de atención.
La inteligencia emocional es algo que ha ido adquiriendo mucha relevancia los últimos años, la importancia en percibir, usar, comprender y manejar las emociones, tanto las correspondientes a uno mismo como a las del resto. Para ello, es evidente que necesitamos emociones reales, por lo que queríamos facilitar la forma en la que se pueden percibir las emociones. ¿Será una máquina capaz de detectar y clasificar las emociones mejor que el ser humano?
Facial Expression Recogniser será una aplicación encargada de detectar las emociones a tiempo real. En esta primera versión se utilizarán las imágenes y, a continuación, su función será clasificar las emociones en cuanto la cámara pueda detectar caras.
Dataset
El dataset utilizado para el desarrollo de este proyecto, que se obtuvo en Kaggle, consistía en una serie de imágenes divididas en carpetas en función de la expresión de rostro. Las etiquetas de las carpetas se dividían según la siguiente clasificación:
0 — Angry
1 — Disgust
2 — Fear
3 — Happy emotions
4 — Sad
5 — Surprise
6 — Neutral
El objetivo principal del proyecto era detectar y clasificar las emociones según estas etiquetas. Para dicha predicción, se usaría imágenes obtenidas mediante la webcam.
Data train
La aproximación
Tal y como ha sido mencionado con anterioridad, a la hora de describir el dataset utilizado, se ha visto que se contaba con imágenes y con las etiquetas de las emociones correspondientes. Esto ha hecho que el proceso de EDA haya restado importancia en este proyecto.
Sin embargo, si ha sido necesario cierto análisis y transformación de los datos. Para empezar, se ha tenido que crear dataframes partiendo del dataset. Para ello, se ha pasado de las fotos que se tenían a pixeles, y se han creado dos columnas en dicha tabla, una la relacionada con la emoción y la otra con los píxeles.
Formato dataset
Además, cabe destacar que desde un inicio se contaba con una clasificación del dataset entre train y test, por lo que la transformación de imágenes a pixels se hizo dos veces, terminando así con dos dataframes: train_data y test_data
Tamaño de tablas
Construyendo el model
El proyecto realizado se basa en Deep Learning, por lo que ha sido necesario el uso de redes neuronales. En nuestro caso, se han utilizado redes neuronales convolucionales, las cuales se utilizan sobre todo para tareas de visión artificial, pues son muy efectivas en la clasificación y segmentación de imágenes, entre otras aplicaciones.
Para ello, se ha presentado un modelo secuencial, lo que permite apilar capas secuenciales en orden de entrada a salida.
Las capas añadidas al modelo han sido:
– Conv2D
– Batch Normalization
– MaxPooling2D
– Flatten
– Dense
– Activation
– Dropout
Para crear el modelo anteriormente mencionado, se ha utilizado Tensorflow y Keras. Este último es una biblioteca de Redes Neuronales escrita en Python. Es capaz de ejecutarse sobre TensorFlow. Este último satisface las necesidades de los sistemas capaces de construir y entrenar redes neuronales para detectar y descifrar patrones y correlaciones.
Después de crear el modelo se inició el entrenamiento del modelo. Al principio, se entrenó el modelo con un solo epoch, lo que además de tardar mucho tiempo, solo obtuvo un accuracy del 0,29. Es por esto por lo que se tuvo que modificar el entrenamiento del modelo, aumentando los epochs, cambiando los pasos a dar en cada epoch, etc.
Además, debido a un problema de guardado se tuvo que crear un callback al ModelCheckpoint, para que almacenará un checkpoint cada vez que un epoch finalizara, así, se pudo obtener un modelo final con más epochs.
Al final, el modelo obtenido ha conseguido un accuracy final del 0.9602. Esto indica la precisión de lo que se entrenó. Sin embargo, si analizamos el val_accuracy, el cual se refiere a cuánto funciona su modelo en general para casos fuera del conjunto de entrenamiento, el valor obtenido ha sido del 0.6035.
Sin embargo, si calculamos la precisión del modelo con el dataset utilizado para el testeo, veremos que el accuracy es bastante bajo, del 0,1733, lo que implica tener mucho margen de mejora este modelo.
Predicción
Una vez tuviésemos el modelo listo, había que predecir y probarlo. Para ello, se codificó de forma que nos indicase aquellas emociones que se podían considerar en la expresión facial de la imagen introducida, y según el porcentaje, concluir con el sentimiento más significativo. Por ejemplo:
Imagen a predecir
Introducimos esta primera imagen, donde es evidente que el chico está mostrando cierto enfado. De esta forma, nuestro modelo lo ha clasificado de la siguiente manera:
Recalcando que el enfado es el sentimiento que predomina en la imagen. Si utilizamos nuestro modelo, con el fin de detectar alguna otra emoción, veremos que también funciona.
Imagen predecida
Tal y como se mencionara en las conclusiones, la intención era incorporar la detección de caras mediante las webcam y así, poder detectar las emociones de una forma más real.
Conclusiones
Una vez finalizado el proyecto, en una reflexión grupal, se comentó lo mucho que se ha aprendido en el desarrollo de este mismo, además de habernos dado cuenta de lo lejos que puede llegar la tecnología, y para ser más precisos la inteligencia artificial.
Hemos visto que en este ámbito de reconocimiento facial se están dando grandes avances, existen modelos que reconocen rostros incluso llevando la mascarilla puesta, y las aplicaciones de esta tecnología sólo están limitadas por nuestra imaginación. Desde el punto de vista de marketing, recoger el feedback de los usuarios y clientes es un proceso muy importante, pero obtener esta información suele costar, casi nadie nos paramos a rellenar un formulario para decir cómo ha sido nuestra experiencia a menos que haya sido negativa.
Es por ello que si somos capaces de detectar puntos rojos en la experiencia de los usuarios sin que suponga para ellos un esfuerzo más se podría mejorar el servicio, y gracias a esta tecnología esto sí es posible.
Próximos pasos
Los próximos pasos que se darán con este proyecto están directamente relacionados con los problemas que se han tenido en la culminación del proyecto. La primera dificultad sufrida por el equipo fue la correspondiente al despliegue en Amazon Web Services, lo que debía facilitar el entrenamiento, hizo que el proyecto quedase parado dada la inexperiencia de los integrantes del equipo con dicha herramienta. Esto ha hecho que el entrenamiento no se pudiese hacer en los servidores de Amazon, lo que ha tardado mucho tiempo y dificulta cualquier modificación y ejecución en el modelo. Es por esto por lo que, próximamente, se intentará realizar dicho despliegue para poder trabajar de una manera más eficiente y eficaz.
Este problema hizo que la desviación sufrida en el tiempo fuese muy elevada, lo que dificultó la culminación de toda la funcionalidad que previmos en primera instancia. Además, esto también estaba directamente relacionado con el pequeño margen que nos quedaba para entrenar el modelo, lo que implica que la eficacia y precisión del modelo no sea la óptima, y aun quede un margen bastante amplio de mejora. Es por esto por lo que se podría, mediante más entrenamientos, obtener un modelo de mayor calidad.
No considerábamos tener tantos problemas cuando definimos el proyecto que queríamos realizar, debido a la inexperiencia que teníamos en este ámbito. Una de las funcionalidades que planteamos al principio era la incorporación de una Web Cam que nos permitiera sacar fotos al instante y poder clasificar las emociones de dicha imagen, para poder hacerlo más real. Sin embargo, debido a la falta de tiempo, es un aspecto que no se ha podido desarrollar pero que sería lo primero que realizaríamos en el futuro.
Sería muy útil integrar nuestro modelo con webcams en las entradas/salidas de todos aquellos lugares que quieran valorar la satisfacción o experiencia del cliente en dicho lugar. Por ejemplo, restaurantes, tiendas, conferencias, etc.
Además, en el futuro sería genial programar que la aplicación fuese capaz de reconocer una imagen tomada en la salida de un lugar con aquella imagen tomada en la entrada a la misma persona. Eso haría que se pudiese comparar eficientemente los resultados de todos los usuarios, y sería un paso adelante enorme ya que dotaríamos a la empresa/institución que lo utilice de inteligencia empresarial. Si a eso le sumásemos una serie de gráficos que visualicen los resultados en una especie de dashboard, podría ayudar a los directivos a tomar diversas decisiones en base a la satisfacción del cliente.
La misión de Saturdays.ai es hacer la inteligencia artificial más accesible (#ai4all) mediante cursos y programas intensivos donde se realizan proyectos para el bien (#ai4good).
Si quieres aprender más inteligencia artificial únete a nuestra comunidad en community.saturdays.ai o visítanos en nuestra web www.saturdays.ai ¡te esperamos!
El fatídico 11 de marzo del 2020, la OMS declaró la pandemia mundial por COVID-19. Más de 300 días después, hemos decidido hacer público y accesible para el mundo entero el trabajo que hemos venido desarrollando durante más de 8 semanas.
Prepárense, gobiernos e instituciones sanitarias del planeta, pues lo que van a ver en este artículo establecerá los cimientos de un nuevo sistema de vigilancia que permitirá asegurar el cumplimiento de una de las medidas que más se ha repetido durante estos fatídicos 300 días: la distancia de seguridad interpersonal de metro y medio.
Nuestro incombustible grupo, formado por 3 “locos” ingenieros (alguno de ellos en proceso) ha trabajado día y noche para traer la mejor solución posible a este problema.
El proyecto, que comenzó bajo el nombre de WATCHDOG (perro guardián) por la misión inicial que teníamos en mente (un robot con autonomía de movimientos que vigilase el cumplimiento de la distancia de seguridad y que ladrase cada vez que esta fuera quebrantada) iba a ofrecer, más allá del obvio beneficio de un constante recordatorio a las personas de la necesidad de cumplir con la medida de la distancia interpersonal, una herramienta para el mapeo y creación de “puntos calientes” en los que la distancia se incumpliese más a menudo.
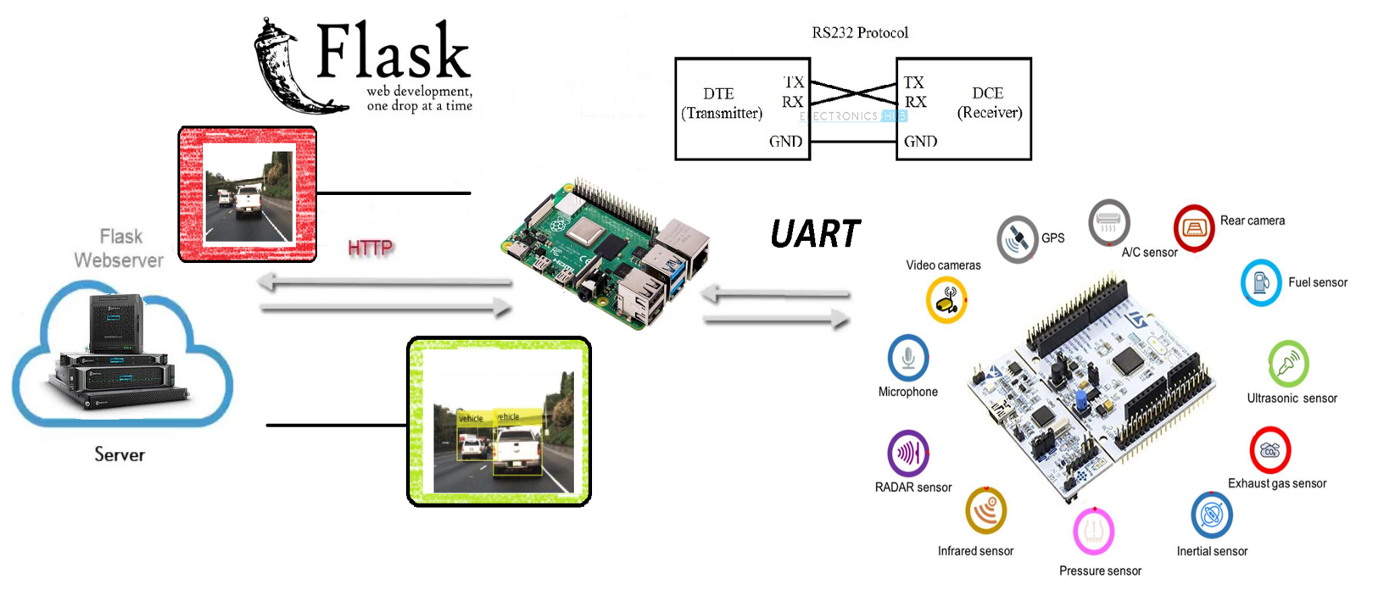
Para todo ello, el equipo ha tratado de crear una convergencia entre los mundos de la electrónica y la Inteligencia Artificial, haciendo uso de los medios más innovadores que tenía a su mano. Con una Raspberry Pi 3, un microcontrolador de bajo nivel equivalente a Arduino Mega, diferentes medios para la comunicación, algoritmos, librerías y redes neuronales convolucionales se ha tratado de alcanzar la solución con la mayor satisfacción posible.
El proyecto
Para el proyecto de Saturdays.AI se ha pensado en desarrollar un proyecto Watchdog (perro guardián) que vigila la distancia mínima recomendada por los protocolos Anti-COVID.
El planteamiento inicial ha sido el de programar un robot capaz de emitir un ladrido cuando la distancia de seguridad (requerido por los protocolos Anti-COVID) fuera quebrantada, enviando los datos adquiridos a un servidor y realizar un mapeo (mapa de calor) en tiempo real.
El objetivo básico del proyecto es converger el mundo OT con el mundo IT, es decir, la convergencia de la electrónica con el de la IA (inteligencia artificial) muy de moda en el mundo IT, utilizando técnicas de Deep Learning, que es una de las ramas del Machine Learning. De hecho, a pesar de que esta primera edición de AI Saturdays Euskadi se haya orientado al Machine Learning en general, hemos decidido profundizar en el Deep Learning por voluntad propia.
Poco a poco se están desarrollando tarjetas electrónicas autónomas que funcionan At The Edge (es decir que la misma tarjeta de control aplica los algoritmos) sin utilizar el Cloud para ello, o sin utilizar una unidad PC más potente para su procesado. Este fenómeno, conocido como Edge Computing, permite aliviar la carga de procesamiento a servidores centrales delegando tareas que puedan ser sencillas pero repetitivas a los nodos externos.
Funcionamiento
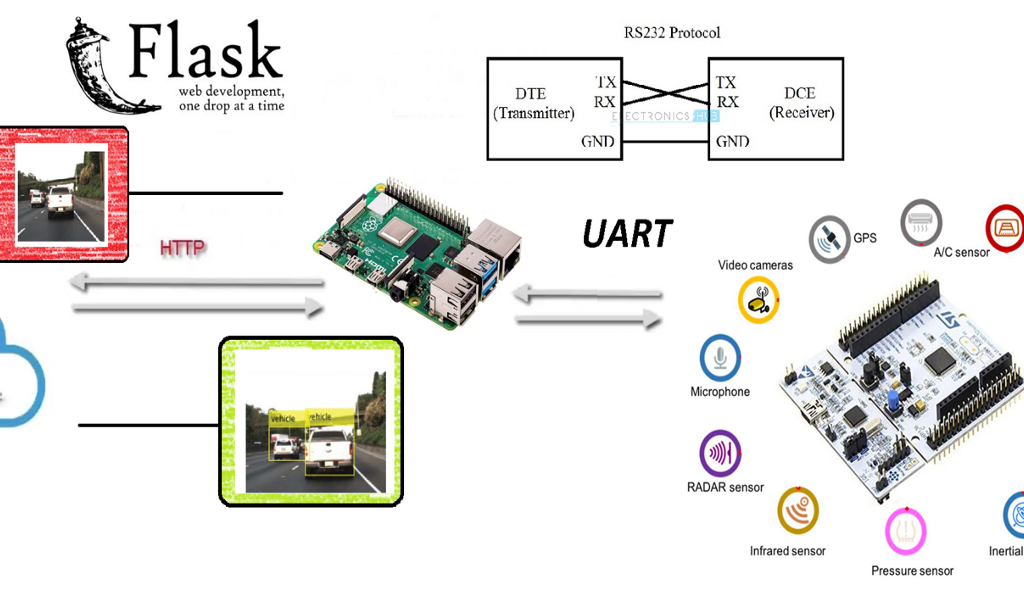
Cuando se detectan 2 personas, manda la posición de la detección y la imagen de violación de la distancia a un servidor Web, creado con Flask.
En lo que al mapeo respecta, la idea inicial era realizar un mapeo SLAM (simultaneous localization and mapping) utilizando un sensor LIDAR o una cámara 3D, pero nos hemos encontrado con limitaciones para hacer un Point Cloud que nos permitiera ejecutar el mapeo. Se describe esta limitación en los Trabajos a Futuro.
Objetivo
El objetivo inicial era plasmar todo el código dentro de una tarjeta Raspberry PI 3 (de aquí en adelante RPi3), pero a pesar de existen librerías para controlar los módulos de entradas y salidas (GPIO), el dispositivo no es lo suficientemente potente para poder procesar todo en tiempo real. Para ello existen módulos dedicados y deterministas que facilitan estas tareas.
Para tratar de cumplir con el objetivo aquí propuesto se ha utilizado un microcontrolador STM32F411RET. Se trata de un microcontrolador de gama baja equivalente a un Arduino Mega, pero con un sistema operativo de tiempo real (Real Time Operating System o RTOS), al ser determinista se tiene el control del timing y tareas, pudiendo tener un mayor control para la adquisición de datos y respuesta de los actuadores.
Se decidió utilizar esta tecnología por la gran cantidad de librerías robustas que existen para controlar los periféricos.
Algoritmo YOLOv4
El algoritmo final que se ha usado ha sido por goleada YOLO (para nuestro caso), respecto a otros conocidos como SSD (Single Shot Detection) o la más precisa de todas las tecnologías RESNET.
El reto en este apartado ha sido buscar la tecnología que mejor se adapta al tiempo real y nos basamos en las reglas de oro que dijo uno de los mentores:
1. ¿Qué pasa en el mercado? ¿Cuál es la tendencia del mismo? ¿Qué tipo de arquitectura es más viable con las restricciones presupuestarias y de tiempo que tenéis?
2. Mirad lo que hacen los grandes. ¿Podemos pensar igual a ellos? Es decir, ¿tenemos que plantearnos entrenar redes extremadamente complejas, o tenemos que poner los pies en la tierra y plantear ejemplos más rápidos para construir un Producto Mínimo Viable (MVP)?
3. ¡Adáptate!
En esta fórmula, el resultado de 1+1 en ingeniería sería determinista pero en la vida real el resultado es estocástico, así que depende. ?
Este proyecto está acotado para capacidad computacional de gama media y se ha querido estrujar al máximo desde ese punto de vista. Por ello, el mejor algoritmo que encontramos, el cual estaba puramente escrito en C (siendo un terrible reto el aplicar funciones matemáticas a pelo; aprovechamos para agradecer a Joseph Redmon) es lo más rápido comparado con librerías escritas a mayor alto nivel (TensorFlow, pyTorch).
Como curiosidad, usando la versión para embebidos de SSD se llega a unos 18 Frames por Segundo (FPS) comparado con YOLO, que llega a 24 FPS. Sin haber añadido telecomunicaciones nos dimos cuenta cuál era el camino a seguir, pero se encontraron todo tipo de resoluciones de las distintas tecnologías.
“Cabe destacar que para el equipo, el algoritmo o tecnología más completo y adaptado si se tuviera un poco más de capacidad computacional serían RNN o FAST-RNN, ya que de una tirada no solo tendríamos la posición de los objetos, sino cada pixel de la imagen estaría vinculado a una clase y con esto se podría dotar al proyecto de la capacidad de contextualizarse en el entorno. Y esto nos llevaría a más poder de adaptación, teniendo en particular un efecto positivo para el ámbito del Machine Learning, donde se dispondría de más DATO al que poder darle valor sacado del entorno.”
Si se tiene aún más curiosidad al respecto, os dejamos este link.
Como esto se extendería hasta el infinito, no se van a explicar los detalles del funcionamiento a fondo; se adjunta un link donde se explica detalladamente el algoritmo en su versión v3. La diferencia está en que en la versión v4 aumenta la precisión pero en su versión tiny la velocidad se mantiene constante.
EDA: Y ahora… ¡Metemos los “Datos” de nuestros sensores a la caja negra!
La analogía del “EDA” realizado en nuestro proyecto de Deep Learning tendría que ver, entre otros, con limpieza y preprocesamientos hechos de las imágenes obtenidas. El primer preprocesamiento ejecutado sería el que ofrece la función BLOB de OpenCV que reduce la escala de 8 bits (255 RGB) a escala porcentual unitaria.
Este detalle es muy importante ya que pasa el resultado de cualquier cámara a la que el algoritmo necesita de entrada. ¿Lo malo? Que se vuelen datos de coma flotante y eso requiere más gasto computacional pero de ese problema ya se encargaron sus autores.
El “tuning” de los parámetros en este aspecto que hemos hecho ha sido pasar la imagen de entrada a la escala más pequeña (316 x 316 píxeles).
Habiendo hecho este primer paso, la imagen pasará por múltiples filtros internos cambiando la dimensionalidad de la entrada y readaptando al mejor estilo de Nolan con películas del calibre de Tenet o Inception. ¿El resultado?
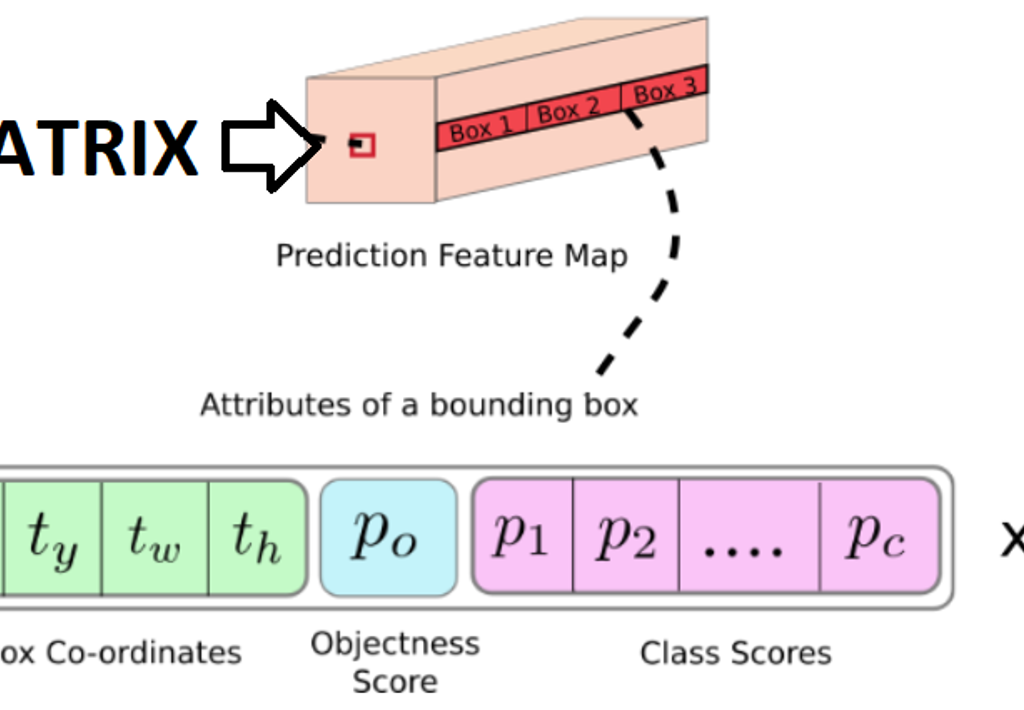
El algoritmo YOLOv4 entrega los datos de la imagen en una matriz compuesta de 13x13x (A x ((B+P) + C)), siendo:
A: La cantidad de anchor boxes (siendo una anchor box un “espacio en el que se puede detectar la posible presencia de un objeto”).
B: Las coordenadas de posición del objeto.
P: La probabilidad de confianza de que hay objeto.
C: Las clases que deseamos identificar y su respectiva probabilidad.
Dentro del archivo “coco.names” están las clases asociadas a sus respectivos nombres pero de este resultado se filtran “únicamente” los resultados en la que la clase es una persona
? ¿Y por qué no reentrenar la red aplicando transfer learning?
Mucho ojo, ya que nuestro equipo se peleó para mejorar la respuesta de este algoritmo para aumentar y darle más valor a la matriz de salida de la versión tiny.
Los resultados, por desgracia, no fueron los esperados. El mapa de características que se crea en estos modelos se basa en cantidades muy grandes de datos y de mucha variedad en el tema de la visión, donde son necesarias grandes cantidades (10.000 imágenes) para que el procesamiento pueda ser fluido. Y es cierto, si se reentrenara partiendo de transfer learning nos ahorraríamos muchas imágenes de entrada, pero también hay que tener en cuenta las clases de objetos que se quieran reconocer. Mientras más clases de objetos haya el mapa de características aprende mejor a separar cada clase.
Por ello, se han usado los pesos de la versión COCO para el algoritmo YOLO, ya que era la más similar para nuestro caso.
A continuación, se aplica un segundo filtro, usado para aplicar el BBOX de los distintos anchor boxes para ver cuál es el mejor.
Estos pasos anteriores formarían el proceso EDA como tal. Sin embargo, y en comparación con un proceso de ML, el filtro que se aplicaría dependería del grado de confianza que se tenga de la detección de un objeto, mientras que en un proceso de ML la “manipulación” se suele hacer sobre el mismo dato.
Todo esto se ensambla en una función llamada “Impure Detector” que nos va a devolver los datos que más nos interesan en una lista de Python de la siguiente forma:
[Coordenadas de las Personas, Index_Impuros]
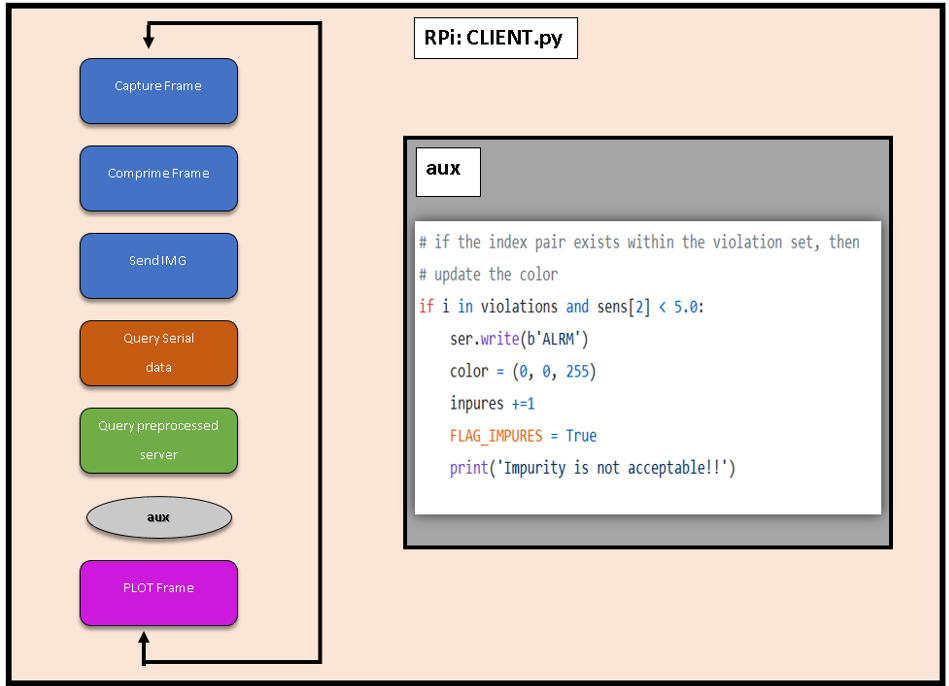
RPI3
La Raspberry 3B+ cuenta con el sistema operativo Raspbian y librerías OpenCV (4.1.0.22).
El funcionamiento de manera general es sencillo: Se procesan los datos de la imagen y se reenvían a un servidor Web Flask instalado en un PC.
Podemos ver más detalles sobre el código de la RPi en CLIENT.py:
● Comunicación Serie
Tenemos una comunicación serie con el microcontrolador. Después de unas cuantas pruebas nos hemos dado cuenta de que, a la velocidad máxima con la que puede trabajar la RPi con python es con un BaudRate 115200 Bits/s, lo que limita la capacidad de mejorar el tiempo de espera entre Cliente-Servidor. Anotamos este aspecto como Trabajo futuro.
● MQTT
También se ha usado MQTT para enviar los datos respecto a la “violación” de la distancia de seguridad” a otro servidor. Sin embargo, como se ha mencionado antes, no se ha llegado a hacer un mapa de calor con el área de los “delitos de distancia de seguridad” a tiempo real, pero conseguimos enviar los datos e insertarlos en un archivo remoto, guardándolos en un fichero CSV dentro del servidor.
Un trabajo a futuro al que, por desgracia no pudimos llegar, era el de generar un pequeño script para graficar o plotear esos datos.
El diagrama de bloques obtenido para nuestro proceso.
Las imágenes son bastante problemáticas ya que enviar los paquetes de información tan largos y en la que la que el orden influya es complicado, es necesario indexarlos. Se han probado muchas, pero muchas metodologías distintas y la que mejores resultados ha dado ha sido usando una REST API del servidor.
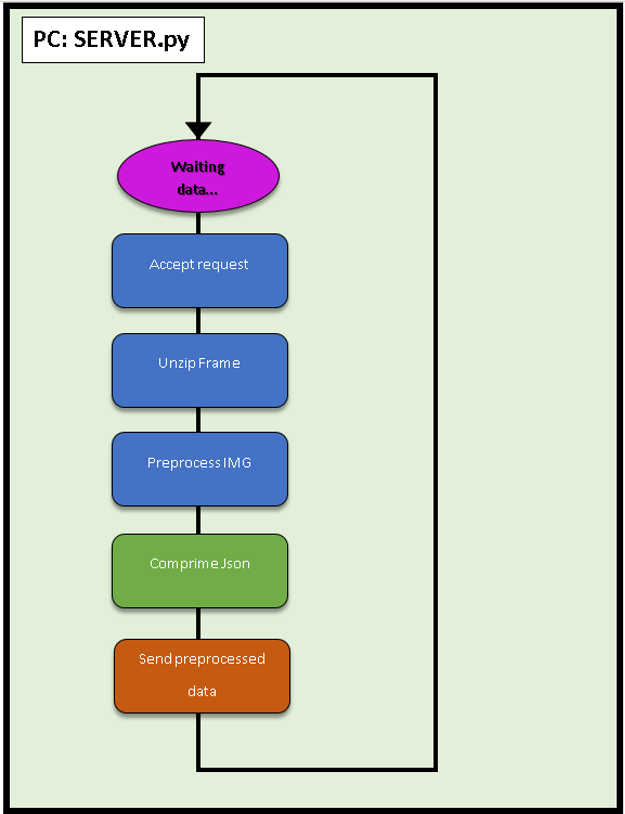
Servidor FLASK:
En Internet se encuentra de todo excepto lo que realmente se quiere, por lo tanto hemos tenido que desarrollar el sistema de envío de imágenes comprimidas por HTTP.
Para ello se han utilizado las funciones de imágenes por excelencia, recogidas en el paquete Open Source OpenCV utilizando un buffer dinámico, evitando la escritura en el disco. Esto se debe ya que por experiencia se ha visto que, a la larga, si no se cuidan, los servidores “envejecen” o “degeneran”. Esto evita por ejemplo forzar los soportes de memoria flash y controlar los ciclos de lectura/escritura aplicados.
Después de emplear OpenCV, nuestro sistema crea la captura en un buffer, lo comprime y se envía al servidor, quien lo descomprime y escribe a disco, dejándolo preparado para su almacenamiento y/o post procesamiento. Este envío se hace en formato JSON ya que se tenían errores al enviarlos en otros formatos.
? ¿Cómo enviar datos que son variables en el tiempo de forma constante?
Normalmente, para que dos personas y/o máquinas se comuniquen tienen que hablar el mismo idioma. En Machine Learning, además, los datos suelen enviarse en bloques constantes de información y de tamaño reducido. En nuestro caso, los pasos que va a ejecutar nuestro cliente son secuenciales y si se tropieza en algún punto todo se va al traste.
Por tanto, se han creado datos “ficticios” para enviarlos como mínimo para que todas las piezas del proyecto puedan funcionar sincronizadamente y en armonía.
Los “impuros” nos van a marcar el index del objeto al que esté pecando pero en los negativos no se va a fijar. Por tanto, esa es la razón por la que el proyecto consigue funcionar sin que se note este pequeño bug.
Esquema general del funcionamiento del servidor Flask.
Microcontrolador
Se ha elegido este microcontrolador (STM32F411RET) por una opción que un Arduino no ofrecía:
La programación de distintas subtareas para que se ejecuten de manera concurrente además de las interrupciones.
Programar en el STMCubeIde nos da la opción de tener la facilidad de programación de Arduino, así como librerías de entornos más industriales.
A diferencia del Arduino en el que el uso de multitareas metiéndolas en un proceso Round Robin es muy complejo, sumado a la limitación de la cantidad de temporizadores o timers que ofrece Arduino Uno 3, con el STM32F404RE estos problemas para insertarlos en la industria se mitigan.
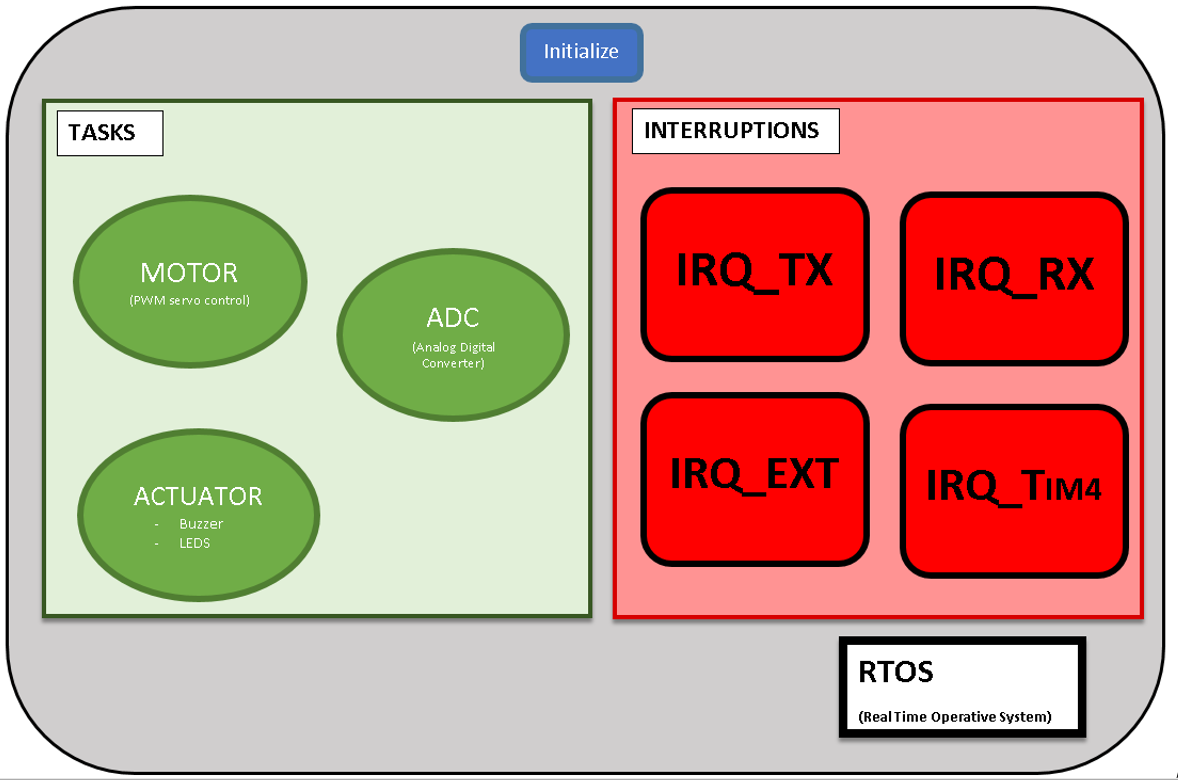
Por tanto, una vez que el micro haya ejecutado la configuración inicial (tareas, interrupciones, timers…) el programa empezará a ejecutar las tareas aplicando un Round Robin, las cuales se agrupan en el siguiente esquema:
Esquema de las Tareas o Programas Concurrentes existentes.
Dentro de las tareas o programas concurrentes existentes existen tres:
1. ADC
Este subprograma se encarga de leer las entradas digitales y procesarlas en 10–12 bits; aspecto que en una lectura por Arduino solo ofrecerá 8 bits de conversión.
Una vez acabadas una por una en orden secuencial, insertará los datos aplicando sus respectivas conversiones en un vector global int32, siendo el motivo para guardarlos como int y no en float que la cantidad de espacio que ocupan se duplicaría (de 32 a 64 bits, por la coma flotante).
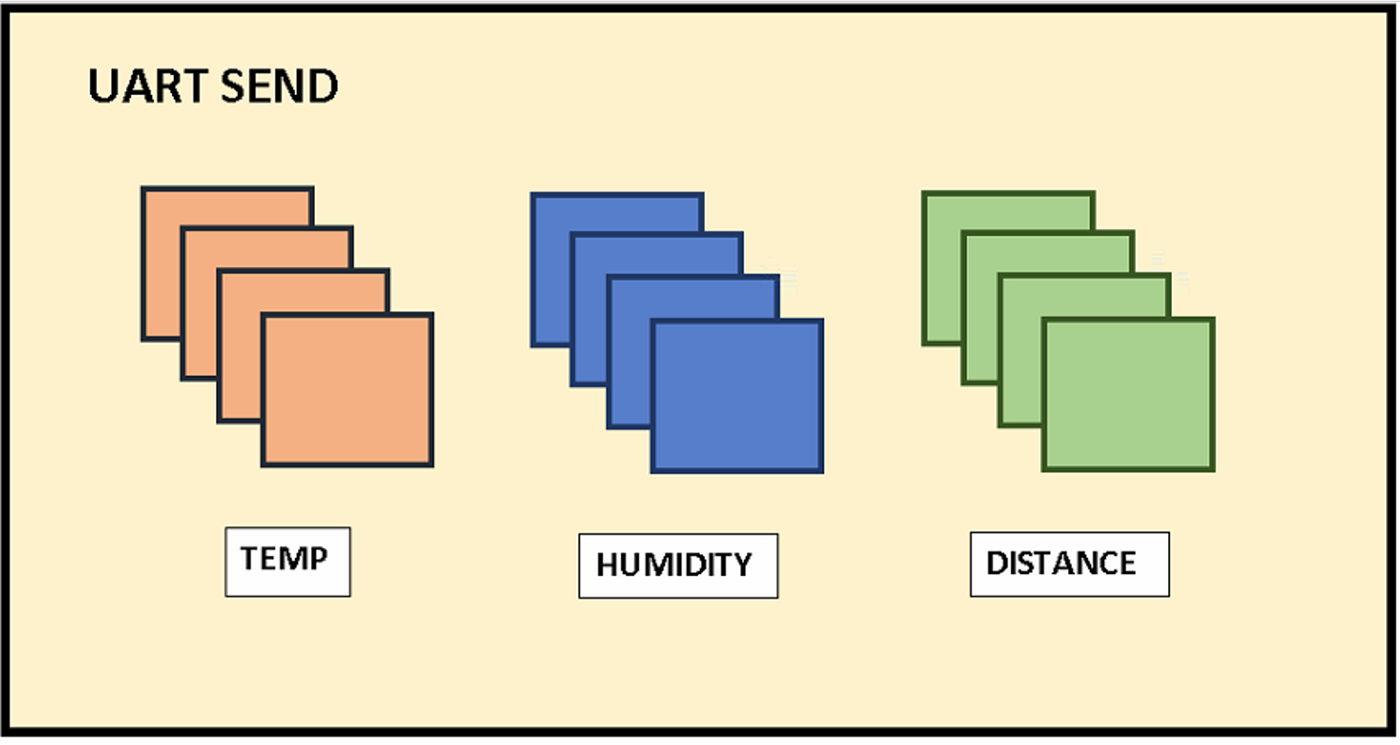
Como se puede apreciar en la imagen del envío del Transmisor-Receptor Asíncrono Universal (UART), se envían 4 datos por cada sensor. El último dato es el que quedaría detrás de la coma flotante para su posterior preprocesamiento sencillo en la RPi.
Ejemplo de esto sería recibir del sensor de distancia un valor de 1004 y transformarlo a 100, 4 en este caso simulando metros de profundidad.
Sensores conectados por UART al microcontrolador
2. ACTUATORS
Dentro de los actuadores podemos encontrar que se conmutarán los estados de las salidas digitales pertenecientes al Buzzer y LED_EXT encargados de dotar al robot de notificar al entorno de manera acústica y visual.
No se ha añadido el actuador del motor porque se cree que separado se entiende mejor a la hora de distribuir el código.
3. MOTOR
Los servomotores trabajan entre 500 y 2500 ticks por lo que nuestra tarea TASK_MOTOR se aprovechará de las interrupciones del timer_4 para cambiar su valor ON/OFF.
Además, se ha añadido un acumulador, de tal manera que si mientras se detecta una violación de la distancia de seguridad y antes de que la función se apague se vuelve a recibir una interrupción por la violación de distancia, aumentará el tiempo de espera 5 segundos más en esa posición. Con esto nos aseguramos de que hay un mayor control de las presencias detectadas.
Interrupciones
Las interrupciones son peticiones síncronas o asíncronas al reloj en la que el procesador va a dejar de lado la tarea que esté realizando para centrarse en la interrupción.
Nosotros hemos definido 4 tipos de interrupciones.
1. IRQ_EXT:
Es la interrupción externa por botón a la que se va a acceder en caso de que haya un error tanto de comunicación o de cualquier otro tipo para resetear la configuración del microcontrolador sin que resetee todo. Reenviará la información y nos avisará enviando un “DONE” por el puerto serial.
2. IRQ_TIM4
Se ha configurado el timer_4 del microcontrolador para que se ejecute cada 1 MHz.
En resumen, para que tardemos 50 Hz que es la velocidad del servomotor tenemos que añadir un registro contador de 0–2000 unidades para que entre en la interrupción cada 50 Hz.
Es decir, que en cada 200 ms recibiremos 20000 ticks. O dicho de otra manera, cada 200 milisegundos nuestro micro interrumpirá la interrupción de ese timer.
3. IRQ_TX:
Esta interrupción únicamente va a encender un LED interno del microcontrolador para saber de manera rápida que todo está funcionando correctamente.
En la figura inferior, además de ver la distribución de los pines se puede ver el pin del LED interno así como el pulsador interno del microcontrolador.
Distribución de los pines del proyecto.
4. IRQ_RX:
A pesar de estar la última en la lista, es la interrupción más importante. Para que la RPi actúe como “cabeza pensante”, es necesaria una interrupción que esté atenta a cualquier señal asíncrona que reciba del microPC y que alerte a la RPi.
Los comandos que se van a enviar desde la RPi son dos:
“SEND”
“ALRM”
Cuando recibamos SEND el microcontrolador enviará los datos que tenga en ese momento en el vector “sens”.
Si recibe ALRM ejecutará los actuadores y si antes de que se acabe vuelve a recibir una entrada ALRM, aumentará el tiempo del mismo.
Figura que muestra el envío de señales a las tareas.
Conclusiones
Se trata de un proyecto aparentemente simple, pero que detrás de todo existe un ecosistema muy complejo al que se le quería meter mano. Solo hay que ver la arquitectura de la infraestructura que ha quedado:
Sensores – Unidad del Microcontrolador (MCU).
MCU – RPi.
RPi – PC: Uso de protocolo HTTP con peticiones POST al servidor web (REST API montada en Flask).
Aunque el objetivo era aplicar temas de Machine Learning, estos temas requieren de una determinada arquitectura y funciones para comunicaciones, tratamiento de imágenes etc. El tema de SLAM + ML se ha quedado a las puertas pero sí se han dado pasos para poder continuar con la misma.
Y a la larga, el objetivo que se había planteado que era aplicar esta tecnología al mundo real aparte de la IT y darle una aplicación más industrial, creemos que aunque no se haya logrado, se está un paso más cerca con el uso de estas “herramientas caseras”.
Como reflexión obtenido, hemos detectado que si se va a empezar a usar el Cloud Computing, para las próximas generaciones hará falta un cifrado de la información muy densa que se envíe (aunque se sacrifique la latencia), ya que es un tema muy serio al que poca importancia se le está dando actualmente.
Trabajo a futuro
Hemos detectado diferentes tareas como trabajo futuro de cara a este proyecto:
El mapeo del entorno, así como la geolocalización indoor. Hemos realizado pruebas con el sistema GPS que adquirimos, pero este sistema requiere que esté en un espacio abierto para su funcionamiento. Para facilitar esta geolocalización con sistemas alternativas, consideraríamos el uso de geolocalización indoor (mediante AprilTags, Bluetooth de Baja Energía o BLE, etc.).
La mejora del microcontrolador, aspecto que podría ayudar a mejorar en más del doble la velocidad de procesamiento de la RPI, lo que nos podría ayudar a compensar el retardo generado en la comunicación Cliente-Servidor.
La creación de un script de plotting para graficar los datos obtenidos mediante la conexión MQTT.
La misión de Saturdays.ai es hacer la inteligencia artificial más accesible (#ai4all) mediante cursos y programas intensivos donde se realizan proyectos para el bien (#ai4good).
Si quieres aprender más inteligencia artificial únete a nuestra comunidad en community.saturdays.ai o visítanos en nuestra web www.saturdays.ai ¡te esperamos!
A mucha gente le motiva los retos en el trabajo, en los estudios y en la vida en general, pero pregunto, puedes imaginar una vida en donde cada día existen retos diferentes, iniciando desde la mañana cuando al levantarte y tomar un refrescante baño en la mañana, debes hacer lo necesario para no tropezar en el camino para encontrar tu ropa y combinarla adecuadamente para la ocasión, pues hoy debes ir al centro de la ciudad a cumplir con unos trámites burocráticos que requieres, además de hacer las compras del supermercado para la semana. Luego de prepararte un café y conseguir que no se te riegue del borde de la taza, estás listo para empezar tu día, sales de tu casa y esperas no tener que tropezar con obstáculos que son comunes en la calle: basura que no llegó a su respectivo tacho, las mejoras de la ciudad caracterizadas por sus constantes cambios de planificación a costa de dejar trabajos inconclusos en las calles, los no tan amigables perros en la calle que podrían poner a prueba tu instinto y la razón, pero bueno es algo que uno ya sabe y lo que debe hacer es llegar hasta la estación del bus y esperar que algún transeúnte de buen corazón te ayude a identificar la línea de bus que te acerque a tu destino. Ya habrá tiempo para ir luego al supermercado, conseguir lo necesario y confiar en recibir lo justo como cambio o tener la seguridad de pagar lo que corresponda.
Estas situaciones describen una vida llena de retos que deben afrontar las personas no videntes cotidianamente, y que muchas veces les impide integrarse socialmente en entornos laborales, comerciales, de ocio e incluso incrementan su dependencia de terceros, lo cual supone, además, un impacto psicológico que eventualmente y de a poco va minando su autoestima.
Dependiendo de la edad en que las personas no-videntes pierden el sentido de la vista puede llegar a ser una experiencia más o menos traumática que podrá ser llevadera si se cuenta con apoyo emocional sobre todo en la etapa inicial y se trabaja fuertemente para educarse y adaptarse a su nueva condición y calidad de vida, que demandará pasar por un tortuoso camino de duelo por la pérdida de la vista.
A pesar de estas situaciones nada alentadoras, existen muchas personas que no se dejan vencer por la adversidad y logran con éxito adaptarse tanto emocional y socialmente para llevar una vida digna y con razones para continuar retando la adversidad día a día.
De acuerdo a la OMS [1] “A nivel mundial, se estima que aproximadamente 1300 millones de personas viven con alguna forma de deficiencia visual.
A nivel mundial, las principales causas de la visión deficiente son los errores de refracción no corregidos y las cataratas.
La mayoría de las personas con visión deficiente tienen más de 50 años.”
Además, El deterioro de la vista o su pérdida, tiene impactos en la calidad de vida de las personas que lo padecen, de acuerdo a OMS, “Los niños pequeños con deterioro grave de la visión a edad temprana pueden sufrir retrasos en el desarrollo motor, lingüístico, emocional, social y cognitivo”.
“En el caso de los adultos mayores, el deterioro de la visión puede contribuir al aislamiento social, a la dificultad para caminar, a un mayor riesgo de caídas y fracturas, y a una mayor probabilidad de ingreso temprano en residencias de ancianos.”
The Lancet Global Health [ 2] afirma que:
“En 2020, un estimado de 596 millones de personas a nivel mundial, tienen deficiencia de visión a distancia, y de estos 43 millones son ciegos.”
“Una proporción grande de estos (90%), viven en países de ingresos bajos o medios”.
“Para 2050, el envejecimiento de la población, el crecimiento y la urbanización conllevarán un estimado de 895 millones de personas con deficiencia visual a distancia y 61 millones de ciegos.”
Ante esta problemática, y como parte de la aplicación práctica de un curso de Machine Learning [ 3] e Inteligencia Artificial (IA) [4], nace la idea de usar la tecnología para identificar ideas que puedan abordar la problemática de las personas con discapacidad visual y diseñar una herramienta que les apoye en la consecución de sus actividades cotidianas. La idea del grupo fue pensar en un proyecto que pueda aportar socialmente y que tenga un impacto en la comunidad. Desde el punto de vista de los Objetivos de Desarrollo Sostenible (ODS) [5] estarían relacionados: Salud y bienestar, Industria, innovación e infraestructura, reducción de las desigualdades y alianzas para lograr los objetivos.
El proyecto Ciclope.IA, como lo hemos llamado, busca integrar en una aplicación para celular, diferentes opciones (skills) orientadas a solucionar limitaciones que experimentan personas con discapacidad visual en sus actividades cotidianas tales como: Reconocimiento de billetes y monedas de manera rápida y efectiva, identificación de la línea de autobús, identificación de colores, conocer el nivel de llenado de un recipiente, encontrar objetos perdidos, etc.
Como se puede observar las opciones que se pretenden integrar son ambiciosas y demandarán un trabajo extenso, sin embargo, es necesario empezar por algo, se suele decir que una “torta se la come en pedazos” y es por ello que la aplicación inicialmente dispone de la funcionalidad que permite al usuario reconocer la cantidad de dinero en efectivo en dólares (billetes), haciendo uso de la cámara de su celular. Posterior a la detección, la app reproduce un mensaje de voz con el resultado del monto reconocido. El uso de Ciclope.IA brinda al usuario seguridad y autonomía al momento de realizar transacciones en efectivo y disminuye el riesgo de ser víctima de engaño. La interacción con la aplicación se puede realizar en idioma español bajo el sistema operativo Android.
Alcance inicial del proyecto
Cuando iniciamos el proyecto y luego de un acercamiento con un grupo de no-videntes identificamos algunas opciones (skills) que deberíamos incluir en la aplicación, así que para tomamos la opción más frecuentemente demandada que es la de identificación de billetes al momento de realizar transacciones monetarias con terceros. Adicionalmente se conoció que la mejor forma de interacción con personas no-videntes es a través de audio, por lo que decidimos que la interacción del usuario con la aplicación se debía hacer a través de voz tanto de entrada como de salida.
Para soportar nuestra configuración revisamos en algunas estadísticas en el sitio yiminshum.com, “actualmente hay 5.190 millones de usuarios únicos en dispositivos móviles, donde no divide el tipo de teléfono, esto cubre el 67% de la población.”
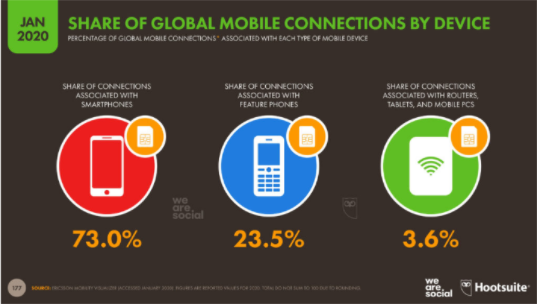
“El 73% de las personas están conectadas y comparten su tiempo desde un teléfono inteligente o smartphone. El 23,5% está asociado en un teléfono común, donde sus funciones son las básicas y limitadas que debe cumplir un teléfono que es llamar y enviar mensajes y el 3,6% está asociado a un router, tablet o PC móvil.”
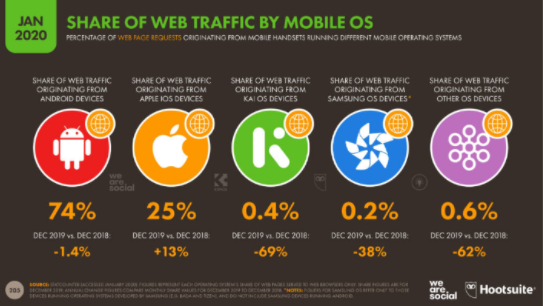
“OS mejor conocido como sistema operativo, son importantes para el funcionamiento de los equipos en el mundo, el 74% de los usuarios son en equipos Android, 25% es iOS, 0,4% es KAI, 0,2% Samsung OS y 0,6% otros sistemas operativos.”
Con esta información se limitó el alcance del proyecto a teléfonos inteligentes Android que cubre una gran parte del mercado sobre todo en lugares diferentes a los Estados Unidos, a países hispanohablantes y que tengan su moneda de uso corriente el Dólar.
IA Aplicada
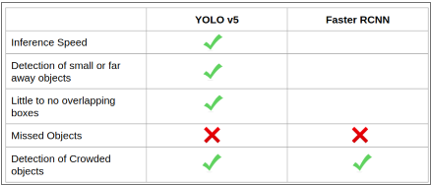
Frente a la problemática identificada se determinó que la mejor manera de apoyar a personas no-videntes es desarrollar una aplicación para celular que haga las veces de sus ojos en situaciones que se requieran, para ello desde el punto de vista técnico se exploraron diferentes modelos de reconocimiento de imágenes que podrían aplicarse, y al final se decidió usar YoloV5 por la versatilidad al momento de identificar objetos y basados en pruebas realizadas por Towards Data Science [6] que recomiendan el modelo frente a otro también muy conocido, otros elementos que consideramos fue la posibilidad de usar el modelo sin necesidad de tener una conexión de internet activa sino un modelo pre-entrenado que se copia en el celular en una versión Pytorch Lite que ocupe menos tamaño y recursos.
Para entrenar el modelo, se exploró opciones de dataset disponibles, desafortunadamente no se consiguió uno por lo que se optó por crear un dataset propio.
Unos de los grandes retos, justamente fue afinar el dataset para que incluya las imágenes adecuadas, considerando diferentes escenarios en los que podrían estar los billetes, considerar el reverso y adverso, y la cantidad suficientes de imágenes. Para conseguir las imágenes se usó una herramienta de Web scrapping y posteriormente con la herramienta online https://labelflow.ai/ se asignó a cada imagen las etiquetas para identificar a cada billete en las diferentes imágenes.
Luego de entrenar el modelo en la herramienta colab de Google se obtuvo un archivo con el mejor modelo generado y se lo uso en la aplicación de celular.
Sin lugar a dudas la IA dará solución a muchas problemáticas del día de hoy y permitirá que su aplicación se extienda masivamente en diferentes áreas del conocimiento y de la vida cotidiana. Nuestro trabajo es una pequeña muestra del potencial a explotar con IA y un aporte para aquellos interesados en apoyar a grupos como los no-videntes que deben superar la adversidad con poco o limitado apoyo de la sociedad.
Conclusiones
Las herramientas de Inteligencia Artificial pueden ser usadas para múltiples propósitos, sin embargo, desarrollar productos que permitan dar solución a necesidades de carácter social, representan una oportunidad enorme que reditúa en bienestar y mejora de la calidad de vida de grupos minoritarios de la sociedad.
Desde el punto de vista técnico el proyecto representó una oportunidad para continuar aprendiendo de este apasionante mundo de la IA y entender entre otras cosas que para crear modelos efectivos es importante trabajar de manera exhaustiva en:
Crear o disponer de datasets de calidad.
Aplicar diferentes modelos para evaluar el desempeño.
Hacer a los usuarios participes del desarrollo de productos.
Trabajar con equipos multidisciplinarios.
Mantener una permanente búsqueda de nuevas soluciones.
La misión de Saturdays.ai es hacer la inteligencia artificial más accesible (#ai4all) mediante cursos y programas intensivos donde se realizan proyectos para el bien (#ai4good).
Si quieres aprender más inteligencia artificial únete a nuestra comunidad en community.saturdays.ai o visítanos en nuestra web www.saturdays.ai ¡te esperamos!
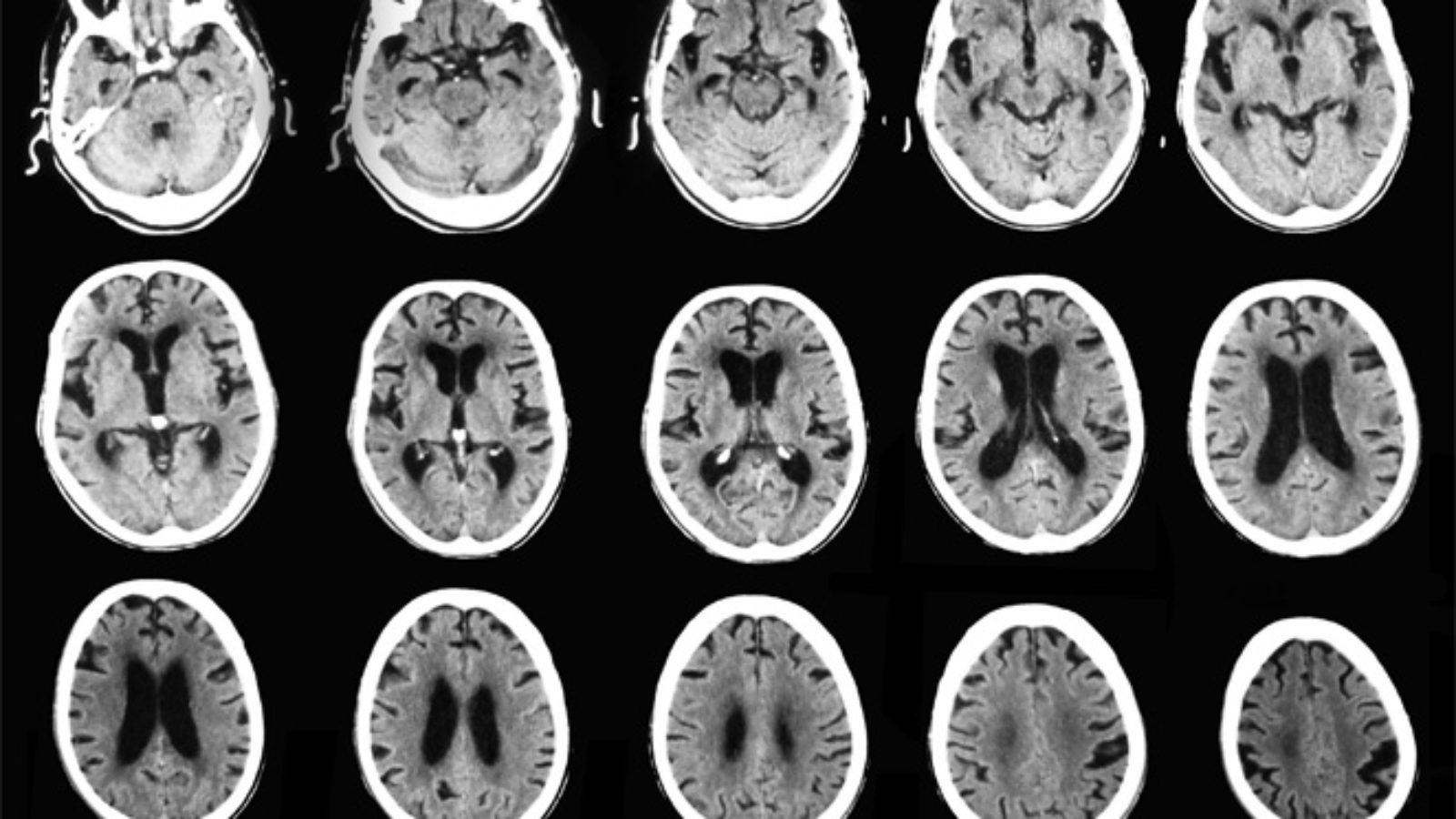
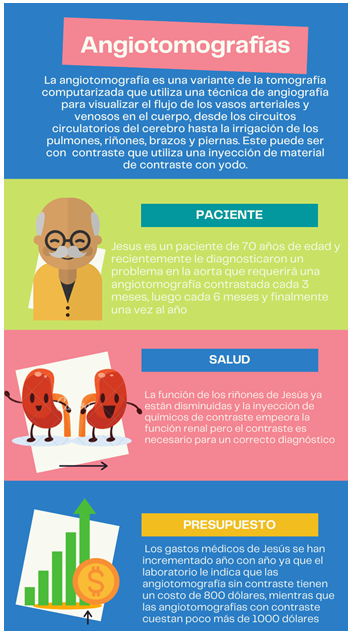
Angiotomografías con contraste ¿Cuál es el problema?
El reto
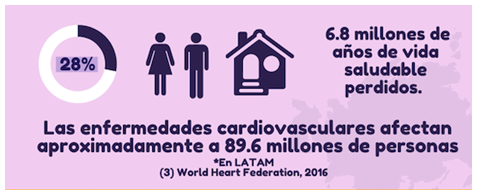
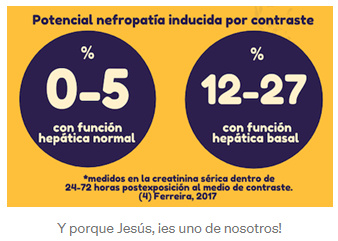
Los medios de contraste vía endovenosa que se usan en las angiotomografias contrastadas pueden tener incidencia en la salud nefrológica de los pacientes, sobre todo en aquellos que tienen antecedentes de hipertensión arterial, hipercolesterolemia, antecedentes genéticos, en edad adulta mayor (60 años en adelante) y un riesgo cardiovascular aumentado (1), es decir, son más propensos a:
tener accidentes cerebrovasculares,
infarto agudo de miocardio,
enfermedad arterial periférica y,
enfermedades de la aorta en general
Existe la posibilidad de realizar angiotomografias simples que no requieren el uso de medios de contraste y que tienen un costo menor (alrededor de $200,00 de diferencia), pero estas no permiten una visualización completa de las estructuras aórticas con claridad (2), por lo que no son útiles en muchos casos, como en el de Jesús.
Por qué escogimos Angiotomografías?
La oportunidad ¿Cómo proponemos solucionarlo?
ANGIOP.AI (Sistema de Transformación de Imágenes de Angiotomografía) genera avances significativos en el análisis de imágenes médicas mediante modelos de análisis de inteligencia artificial para angiotomografias, brindando una alternativa que signifique un menor impacto para la salud de los pacientes que, por su diagnóstico y estado general, requieren realizarse este tipo de análisis de manera recurrente.
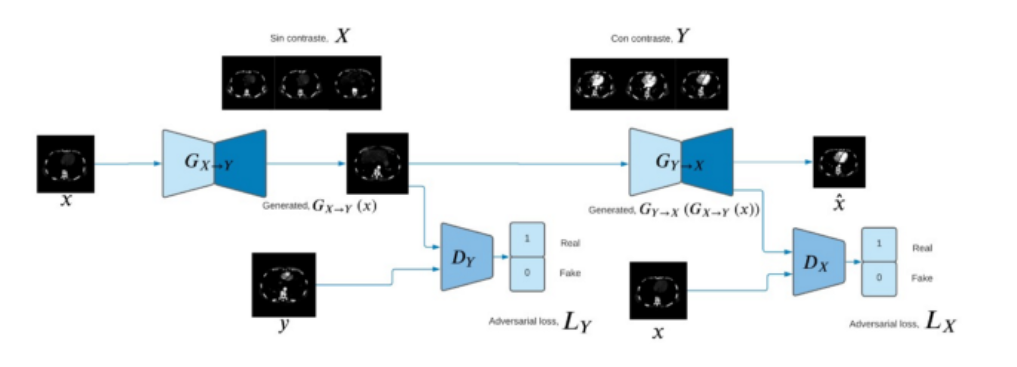
Figura 1. Estructura del modelo GAN aplicado a la transformación de imágenes de Angiotomografía
ANGIOP.AI basa su funcionamiento en el entrenamiento, validación y evaluación de un modelo CycleGAN para procesar imágenes de angiotomografias sin contraste y transformarlas en imágenes similares a las que se obtendrían usando métodos de contraste; se entrena un CycleGan para leer una imagen de un dataset X (imágenes sin contraste) y transformarlo para que parezca como si perteneciera a un dataset Y (imágenes con contraste).
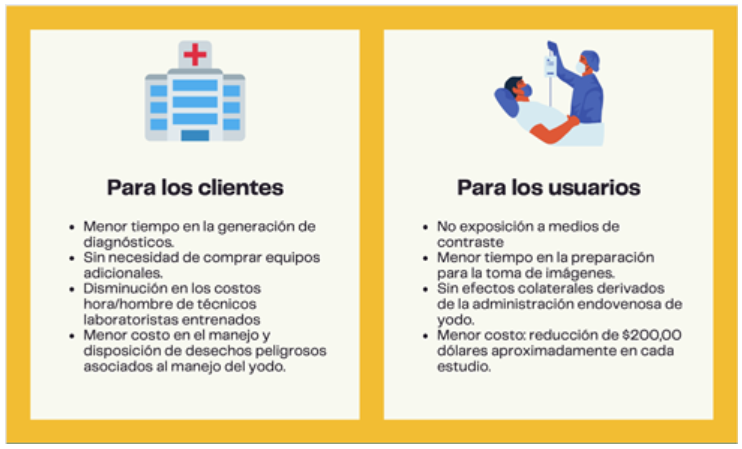
¿Cuáles son los beneficios?
ANGIOP.AI está alineada al cumplimiento de los objetivos de desarrollo sostenible de las Naciones Unidas al 2030.
Lo explicamos paso a paso: metodología, modelo usado y datasets
Los datasets utilizados corresponden a los provistos por el Dr. Gonzalo Pullas, director de la carrera de Medicina en la Universidad de las Fuerzas Armadas; quien facilitó las imágenes de angiotomografias con contraste y angiotomografias simples (sin contraste) de 10 pacientes anónimos.
El total de imágenes facilitadas fueron de 5.144, de tamaño 512 x 512, en escala de grises, a las que se les aplicó una exploración de los datos — análisis estadístico para descartar imágenes a color y en 3D, sin datos atípicos y con Diferencias en distribución de pixeles (zonas / cortes). Es importante mencionar que las angiotomografías fueron tomadas en la misma zona anatómica, pero en diferentes oportunidades, es decir, las imágenes no corresponden a una paridad 1:1.
El modelo utilizado es CycleGan con pre-procesamiento de imágenes de escala -1 a 1 para la entrada del modelo. Los discriminadores son redes convolucionales con 5 capas que receptan imágenes de 256×256. Las 4 capas son de definición de patrones y una capa de clasificación. El generador utiliza tres capas convolucionales y seis bloques residuales. Para el cálculo de las funciones de costos, tanto para las imágenes reales como falsas, se está utilizando el proceso del error cuadrático medio (mean squared error).
El modelo utiliza los siguientes parámetros:
20000 épocas
Tasa de aprendizaje del 0,0001
Para el entrenamiento se aplicaron los siguientes pasos:
Seleccionar una cantidad de imágenes reales
El generador toma las imágenes reales y les agrega ruido para crear una cantidad de imágenes falsas
Entrenar al discriminador, haciendo que clasifique las imágenes como falsas o verdaderas un cierto número de veces o épocas
Generar otra cantidad de imágenes falsas para entrenar el generador
Se entrena al modelo
Para finalizar el modelo, se debe revisar la veracidad de la ejecución, revisando el gráfico de pérdidas a través del tiempo y revisando las muestras generadas por el modelo.
Veamos los resultados:
Lecciones aprendidas
Enseñar al modelo a validar las imágenes de entrada si corresponde a la zona angio toráxica.
Aumentar el Dataset para futuros entrenamientos.
Se requiere una validación de las imágenes generadas con un panel de expertos médicos.
Lo que se viene: Futuro de ANGIOP.AI
Usar la data generada para medir el impacto del uso del sistema en reducción de incidencia de enfermedades renales.
Diego Chiza, Ana Gayosso, Gabriela Jiménez, Paola Peralta, Patricia Román José Daniel Sacoto, María Teresa Vergara, Hilario Villamar, David Medrano.
Presentación del proyecto: DemoDay
Repositorio
El código fuente de este proyecto se puede encontrar en: github
¡Más inteligencia artificial!
La misión de Saturdays.ai es hacer la inteligencia artificial más accesible (#ai4all) mediante cursos y programas intensivos donde se realizan proyectos para el bien (#ai4good).
Si quieres aprender más inteligencia artificial únete a nuestra comunidad en community.saturdays.ai o visítanos en nuestra web www.saturdays.ai ¡te esperamos!
En la actualidad, los desechos municipales a nivel mundial podrían aumentar un 70% en los próximos 30 años, provocando así montones de basura acumulados alrededor del mundo (Banco Mundial, 2019). Es por esto que, si no se toman medidas urgentes, se espera un futuro donde el convivir con basura sea algo normal para la sociedad.
Debido a las consecuencias de las acumulaciones de basura no controladas ni planificadas se deben tomar diferentes estrategias que amortigüen sus ocurrencias en distintos puntos del mundo.
Descripción del problema
El problema de la acumulación de basura no solo radica en el mal olor que se percibe, sino la imagen de insalubridad, desorden y hasta de inseguridad que la basura se desparrama en las calles genera. En las calles se puede encontrar desde cartones y pañales, hasta cáscaras de frutas, plástico y sábanas viejas. Todo esto al pie del canal de aguas lluvias, en cuyas bases también es común ver flotando todo tipo de desechos.
Según el Ministerio del Ambiente, en el Ecuador la más crítica es la Costa, en donde apenas el 10% de los municipios dispone de un relleno sanitario, manual o mecanizado; en la región Sierra son 25%, y en el Oriente, el 24%. Por lo que las cifras de basura dentro del país aumentan diariamente tal y como se visualiza en la Figura 2.
Figura 2.- Cifras de la basura en el Ecuador.
En la figura 2.1, se visualizan algunas de las consecuencias de la acumulación de basura como lo son: daños en la infraestructura pública, aumento de enfermedades y plagas, inundaciones en las calles, obstrucción en los alcantarillados y entre otros.
Figura 2.1.- Consecuencias de la acumulación de basura.
En la ciudad de Guayaquil, las penas por desechar desechos sólidos no peligrosos al margen de la frecuencia y horarios establecidos y acumular la basura en parterres y aceras; van desde los $80 a $500 .
¿Cómo nace nuestro proyecto?
Ciudad Limpia se basó en la siguiente pregunta : ¿Cómo identificar de manera oportuna la acumulación de la basura no controlada en la ciudad de Guayaquil para minimizar el impacto en la sociedad? Por tal motivo creamos una aplicación que nos permite contribuir en la recolección de basura. Haciendo participe a la ciudadanía en mejorar la limpieza de la ciudad y que alguna empresa se interese en nuestra herramienta tecnológica basada en Inteligencia artificial.
Integrantes del proyecto
Figura 3.- Equipo morado — SaturdayAI –ÉPICO 2021
Experiencia del equipo
Manuel Ahumada “Fue una experiencia de aprendizaje práctico: enfocado en el hacer para adquirir los temas y conceptos presentados. Eso refuerza el conocimiento.”.
Patricia Andrade “Mi experiencia fue muy enriquecedora debido a todo el nuevo conocimiento que aprendí. Además, me gustó mucho el compartir ideas con compañeros de distintos campos para solucionar un problema práctico”.
César Villarroel “Fue una experiencia de aprendizaje práctico: enfocado en el hacer para lograr adquirir los temas y conceptos presentados. Eso refuerza el conocimiento.”.
Ingrid León “La experiencia que se obtiene en esta modalidad es buena, El poder compartir conocimientos, desafíos y riesgos hacen que seamos más profesiones. Me quedo con una frase “«Son dos las opciones básicas: aceptar las condiciones como existen o aceptar la responsabilidad de modificarlas»”, entonces podemos mejorar siempre”.
Objetivo general
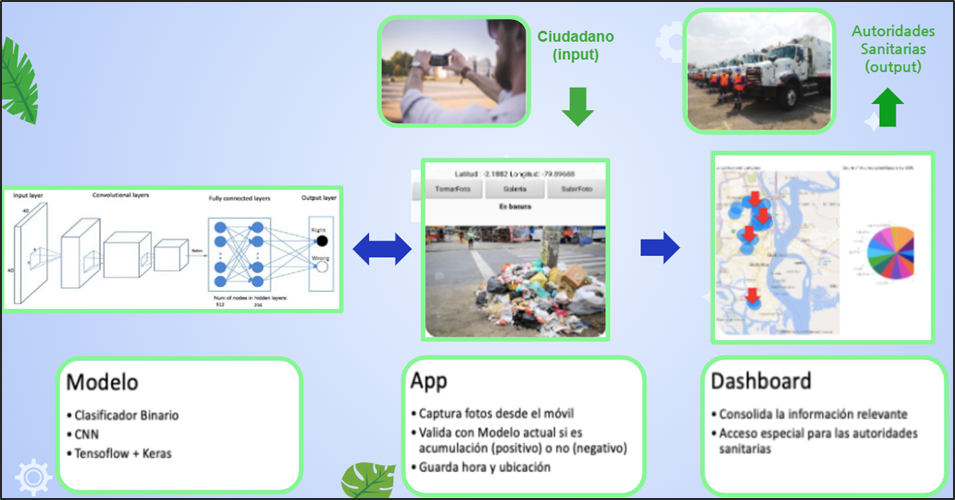
En la siguiente figura 4, se puede visualizar la idea principal del proyecto.
Desarrollar una aplicación basada en Inteligencia Artificial que permita identificar aglomeraciones de basura en la vía pública de zonas urbanas.
Figura 4.- Propuesta de valor del proyecto.
Planteamiento de la solución
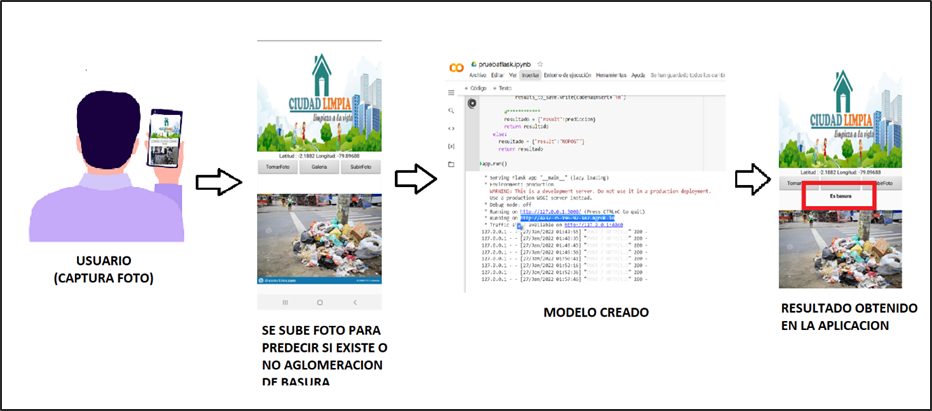
Se proyecta que mediante la colaboración de los ciudadanos se cree una concientización donde formen parte de la limpieza y cuidado de la ciudad. ¿Cómo lo van a hacer? Fácil, a través de la app “Ciudad Limpia” , en donde pueden tomar una foto para identificar y reportar la acumulación de basura de un sector determinado. Además, la aplicación registra la fecha, hora y ubicación del problema. Dicha aplicación estará basada en Inteligencia Artificial que permitirá identificar aglomeraciones de basura en la vía pública de zonas urbanas y fomentar un plan de acción inmediata para las autoridades sanitarias.
Figura 5.- Diagrama General de la solución.
Conjunto de datos
El conjunto de datos que se formó fue basado en descarga de imágenes de manera individual desde el Internet, videos transformados en fotogramas. Además, se sacó la plataforma de Kaggle y Google Street view donde se pudo obtener una gran cantidad de dataset de imágenes de aglomeración de basura.
Figura 6.- Medios para obtener el conjunto de datos
Selección del modelo
Para la selección de los modelos se obtuvo las siguientes consideraciones:
Fácil implementación.
Rendimiento del modelo.
Limitación de cálculo.
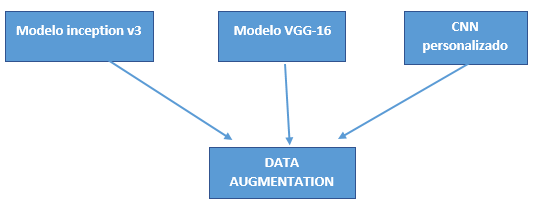
Estas consideraciones son debido a los recursos que se tienen para realizar el objetivo general. Los modelos a desarrollarse son:
CCN Personalizado.
VGG-16.
inicioV3.
Técnicas implementadas
La principal técnica utilizada para compensar el conjunto de datos de tamaño limitado por la limitación de búsqueda de imágenes en Google fue la “aumentación de datos” realizada por la librería de keras “ImageDataGenerator”.
Data augmentation
El aumento de datos es la generación artificial de datos por medio de perturbaciones en los datos originales. Esto nos permite aumentar tanto en tamaño como en diversidad nuestro conjunto de datos de entrenamiento. En el computer vision, esta técnica se convirtió en un estándar de regularización, y también para mejorar el rendimiento y combatir el overfitting en CNNs.
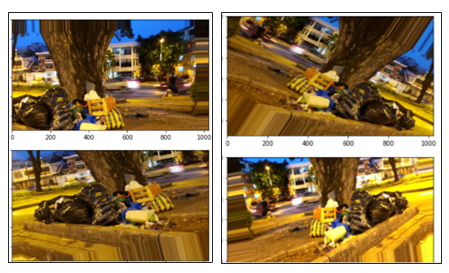
Figura 7.- Ejemplo de aumento de datos.
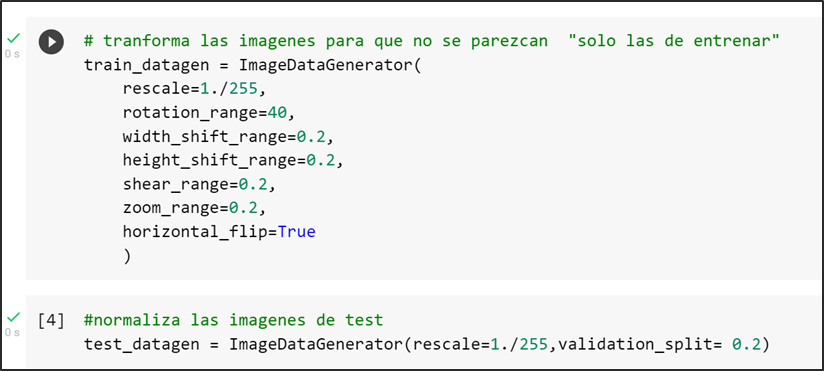
En los tres modelos seleccionados se consideraron la técnica de aumento de datos con el objetivo de normalizar o re-escalar los píxeles en un rango de 0 a 1. Además de modificar las imágenes del conjunto tren con el objetivo de que existe una distinción en cada una de las imágenes seleccionadas tanto de ancho, largo, amplitud, rotación y escalamiento. A continuación, se observa el código donde se transforman las imágenes de entrenamiento con los parámetros seleccionados:
Figura 8.- Código del entrenamiento de imágenes.
CNN personalizado
En el modelo CNN personalizado se aplicaron técnicas de regulación, callbacks y por último keras tuner.
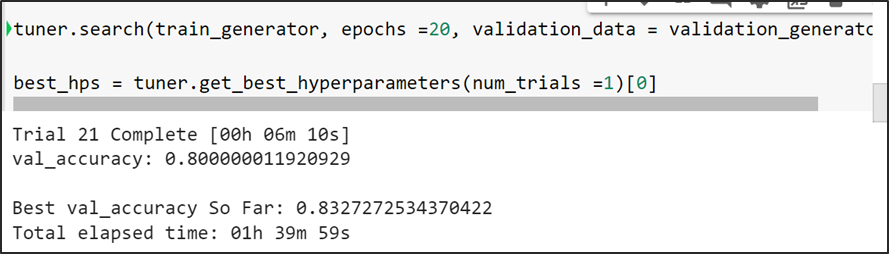
Keras Tuner
Keras Tuner es una librería muy sencilla de utilizar que simplifica en gran medida complejidad el proceso de aplicar de optimización de hiper-parámetros sobre redes de neuronas profundas construidas mediante Keras, ofreciéndonos un amplio grado de versatilidad para optimizar tanto la estructura de nuestra red como la configuración de los parámetros de algunos de los algoritmos implicados en el proceso de entrenamiento.
Figura 9.- se puede constatar el valor del ensayo y exactitud
Keras Tuner mientras va analizando cada trial, verifica el mejor valor de val accuracy infiriendo que es la mejor configuración de la arquitectura y la procede a guardar la mejor configuración de la arquitectura del modelo (número de capas) con el cual tiende a lograr la mejor métrico.
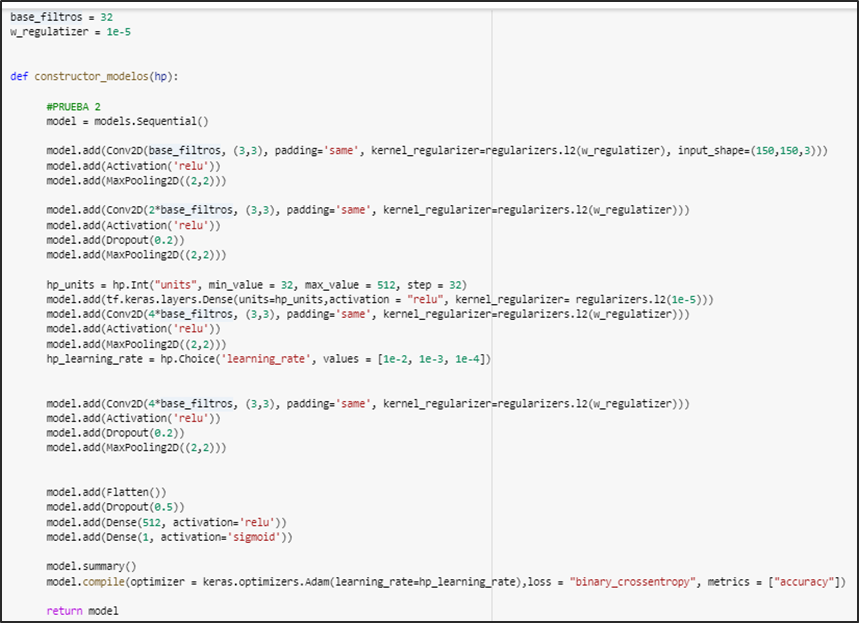
Figura 10.- código del modelo cnn
Arquitectura del modelo cnn personalizado cuenta con regularizadores, convolución, keras tuner
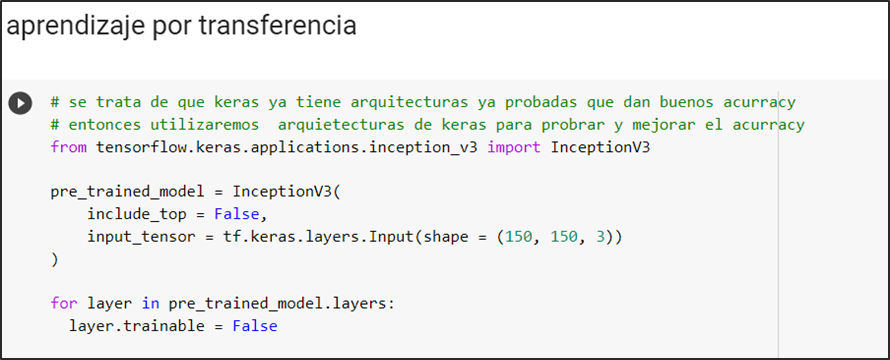
InceptionV3
Figura 11.- muestra el pre-entrenamiento
Se define el modelo pre-entrenado inceptionv3, valida el tamaño de las imágenes de input con que se entrena:
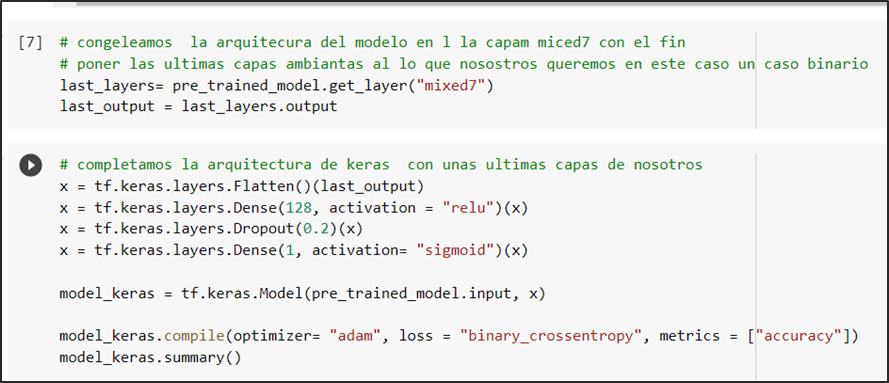
Figura 12.- uso de la arquitectura mixed7
Se congela la arquitectura en la capa “mixed7” para después alterarla añadiendo capas basadas en la predicción de nuestro modelo que es una clasificación binaria por el cual la última capa tiene activación sigmoidal la cual nos ofrece como resultado la probabilidad de que si un caso es positivo o negativo
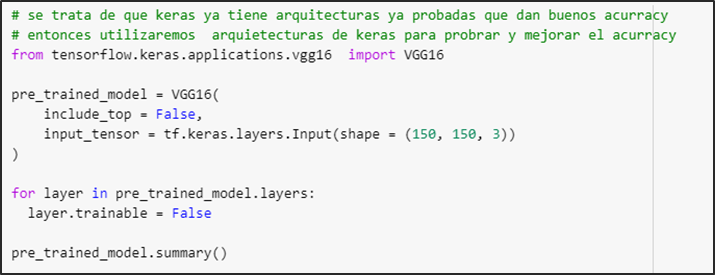
VGG-16
Figura 13.- Características adicionales con VGG16
Se define el modelo pre-entrenado vgg16y valida el size de las imágenes de input con que se entrena
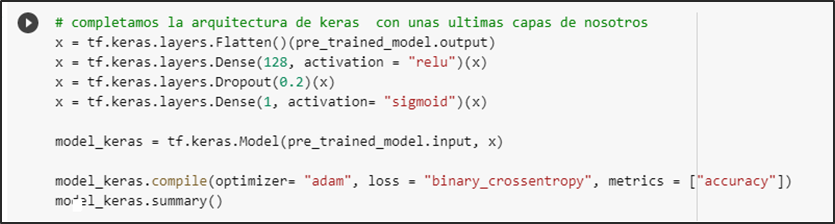
Figura 14.- aumento de capas (clasificación binaria)
Se procede a aumentar las capas basadas en la predicción de nuestro modelo que es una clasificación binaria por lo cual la última capa tiene activación sigmoidal la cual nos ofrece como resultado la probabilidad de que si un caso es positivo o negativo
Análisis de resultados
CNN personalizado
Figura 15.- gráfica del modelo cnn personalizado con 20 épocas
En la evaluación del modelo se entrenó con 20 épocas. Sé puede verificar que no logra converger en su totalidad. Logra una accuracy de la evaluación del conjunto test del 78 %
InceptionV3
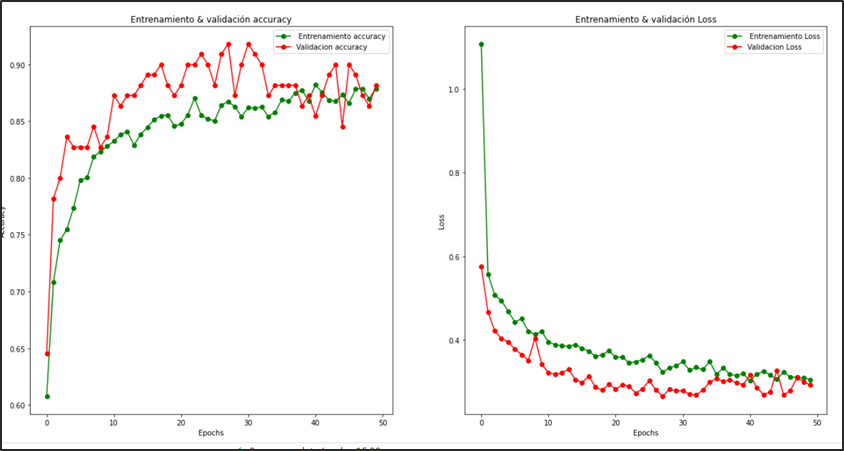
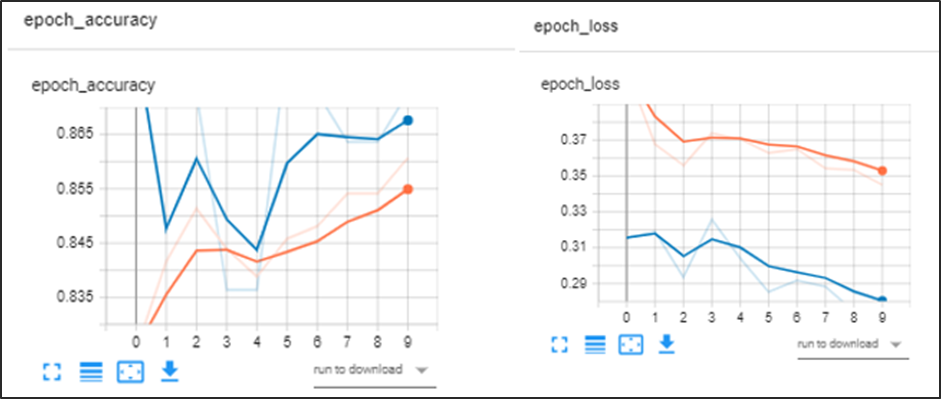
Figura 16.- grafica del modelo pre-entrenado con 50 épocas
En la evaluación del modelo el cual se entrenó con 50 épocas se puede analizar que logra converger en totalidad a partir de la época 28 en adelante, con una precisión de la evaluación del conjunto test del 85 %
VGG-16
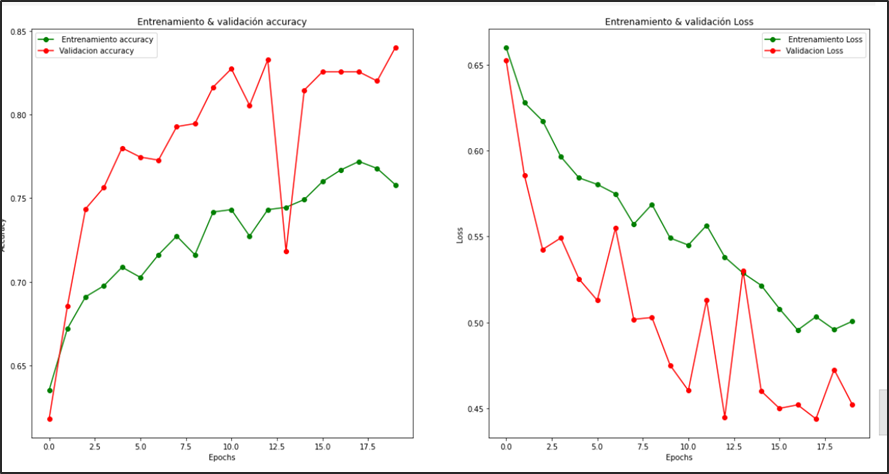
Figura 17.- gráfica del modelo pre-entrenado con 10 épocas
En la evaluación del modelo el cual se entrenó con 10 épocas se puede analizar que logra converger, con una precisión de la evaluación del conjunto test del 84 %
A continuación, mostramos las predicciones de los modelos:
InceptionV3
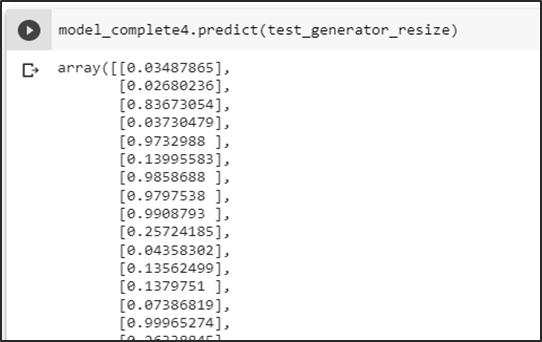
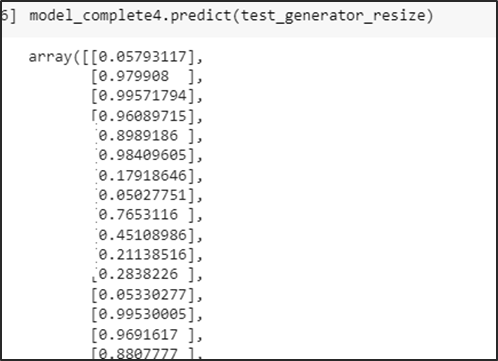
Predicción de la carpeta test
Se obtiene las probabilidades de predicción del conjunto test
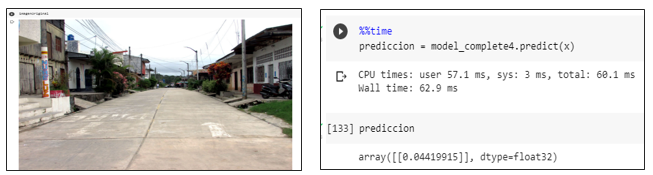
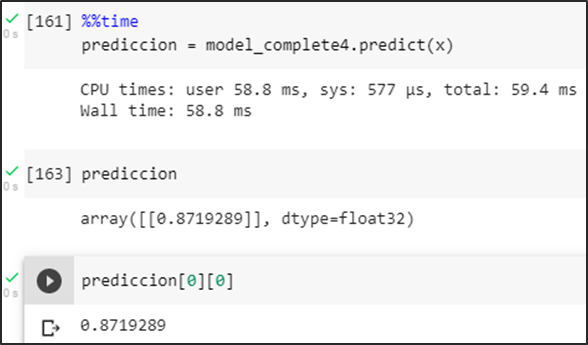
Primera prueba sin basura
Prueba del modelo prediciendo una imagen sin basura dando como resultado una probabilidad menor a un umbral de 0.5 se la identifica como una no aglomeración.
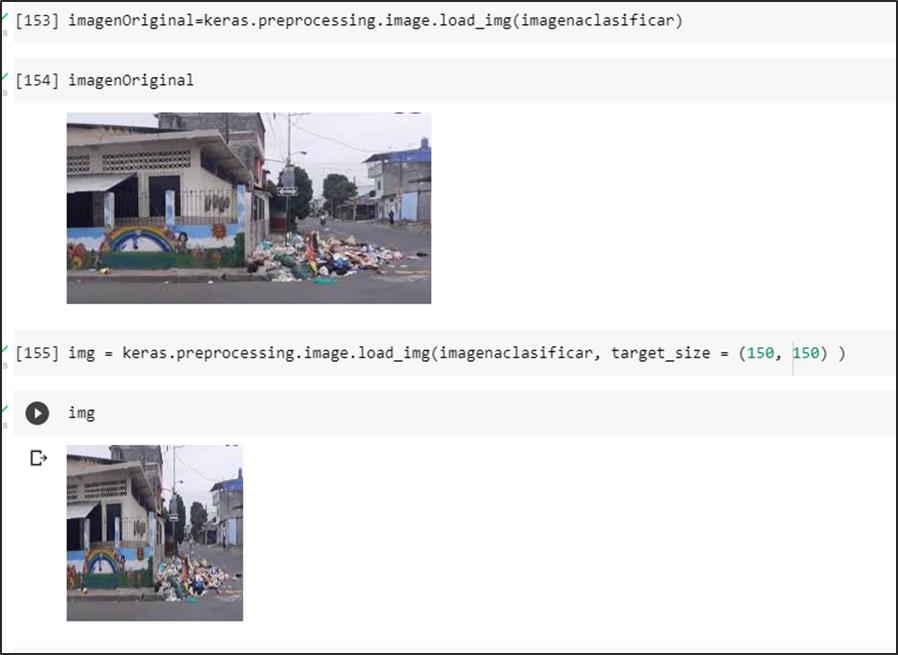
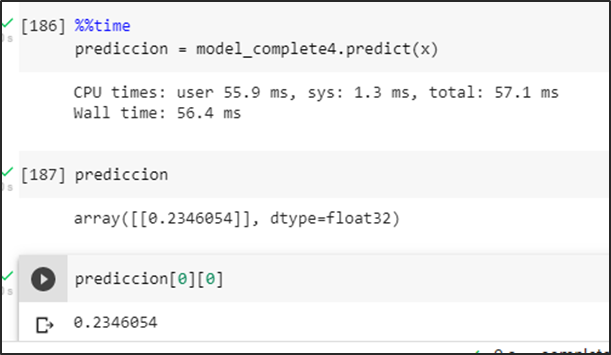
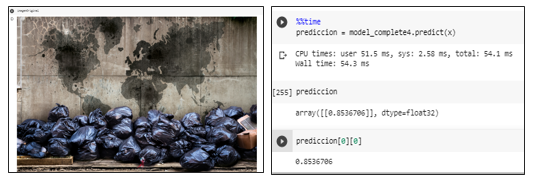
Segunda prueba con basura
Prueba del modelo prediciendo una imagen con basura generando una probabilidad mayor a un umbral de 0.5 se la identifica como una aglomeración.
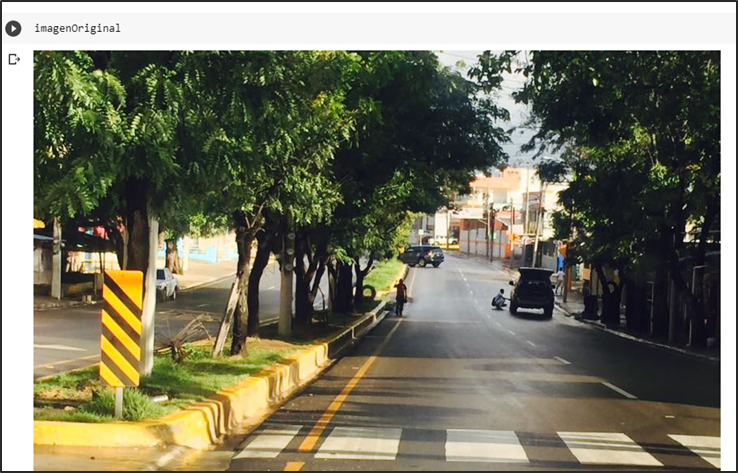
Tercera prueba con imagen y muchos colores
Prueba del modelo prediciendo una imagen falsa positiva intentando romper la predicción en consecuencia se obtiene una probabilidad menor a un umbral de 0.5 se la identifica como una no aglomeración
VGG-16
Predicción de la carpeta de test
Se obtienen las probabilidades de predicción del conjunto test
Primera prueba sin basura
Prueba del modelo prediciendo una imagen sin basura dando como resultado una probabilidad menor a un umbral de 0.5 se la identifica como una no aglomeración
Segunda prueba con basura
Prueba del modelo prediciendo una imagen con basura mostrando una probabilidad mayor a un umbral de 0.5 se la identifica como una aglomeración
Tercera prueba con imagen de diferentes colores
Prueba del modelo prediciendo una imagen falsa positiva intentando romper la predicción en consecuencia se obtiene una probabilidad menor a un umbral de 0.5 se la identifica como una no aglomeración
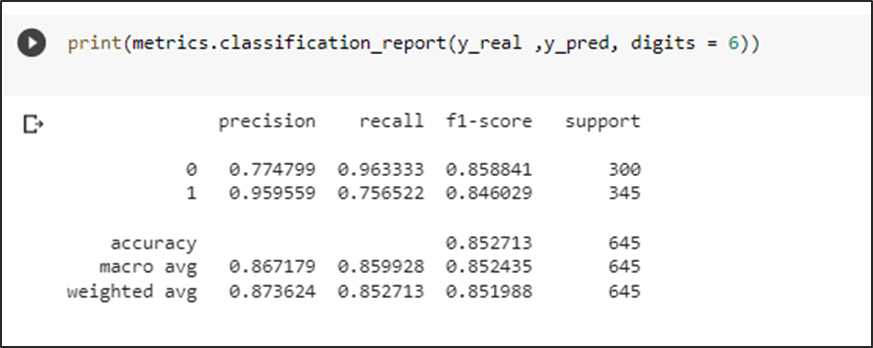
Métricas del modelo elegido: InceptionV3
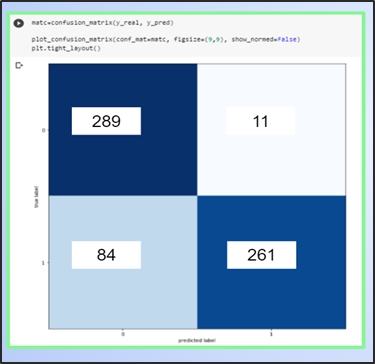
Matriz de confusión
En la matriz de confusión podemos deducir que está prediciendo aceptablemente, pero puede mejorar la predicción de los falsos negativos esto se puede solucionar aumentando imágenes de positivos para que el entrenamiento del modelo mejore los positivos
Métricas
Las métricas obtenidas son aceptables con un f1 score del 85 % de predicción para casos negativos y un 84 % para casos positivos, esto confirmaría la teoría de aumentar los datos en positivos
Aplicación móvil (“Ciudad Limpia”)
Por qué elegimos App Inventor?
En la actualidad, existen muchas maneras de desarrollar aplicaciones en dispositivos móviles que cumplen con una función en específico y son compatibles con distintos sistemas operativos.
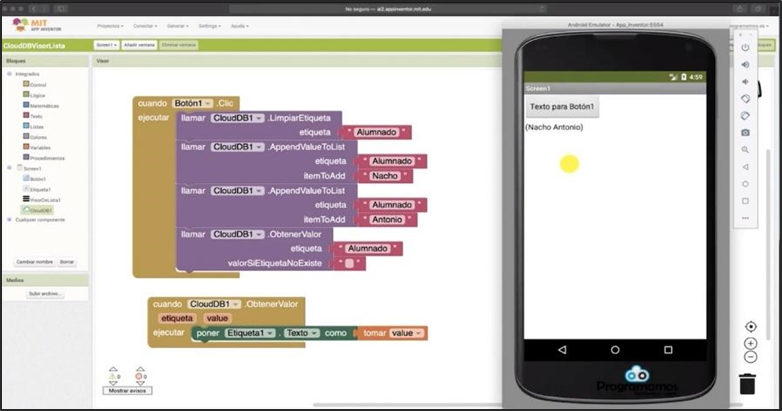
Es por esto, que se seleccionó como herramienta de programación y desarrollo de nuestra App “Ciudad Limpia” al entorno de App Inventor . Mediante esta plataforma se puede programar en JavaScript de manera fácil y sencilla debido a que utiliza una programación en bloques que permite un mayor entendimiento y uso por parte del usuario.
Figura 18.- Entorno de App Inventor
Arquitectura
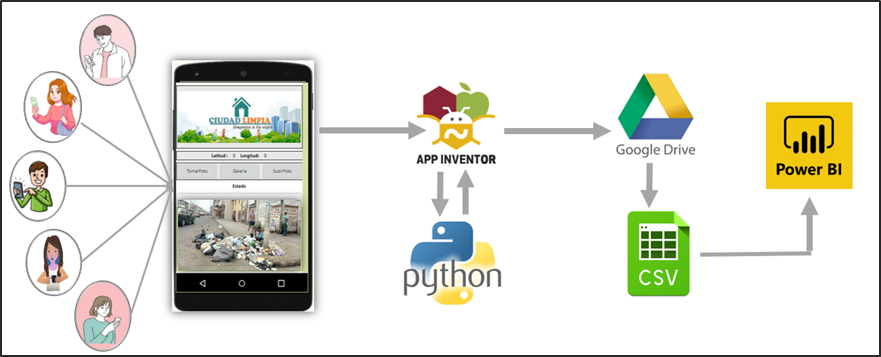
Con respecto a la arquitectura de nuestra aplicación “Ciudad Limpia”, se tiene los siguientes pasos a seguir, tal como se observa en la siguiente ilustración ():
Figura 19.- Arquitectura de la aplicación
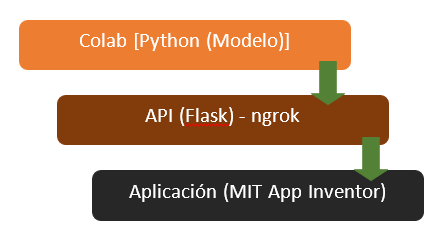
Conexión de App Inventor con Google Colab
La conexión de la aplicación “Ciudad Limpia” con el modelo creado a través de Google Colab se realiza a través de la creación de un servidor local expuesto al Internet para el acceso de la aplicación móvil utilizando ngrok. Realizando una petición POST desde APP Inventor, se realiza el envío de la imagen codificada en bit64 al servidor el cual ejecuta el modelo y devuelve el resultado obtenido clasificado como aglomeración o no aglomeración de basura.
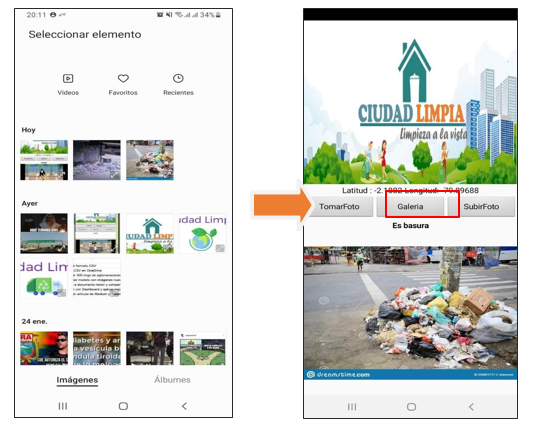
Funcionalidad de la aplicación «Ciudad Limpia»
Con respecto al entorno y manejo de la App “Ciudad Limpia” se consideran tres botones dentro de la interfaz con distintas funciones al momento de procesar una fotografía:
· Usuario “toma foto”: En este caso, el usuario utiliza la cámara de su dispositivo para capturar la imagen de la aglomeración de basura en su sector.
· Usuario selecciona “foto de galería”: En este caso, el usuario selecciona una foto que tenga registrado sobre la aglomeración de basura en su sector que encuentre dentro de su galería de imágenes de su celular.
· Usuario “sube foto”: En este caso, el usuario sube la foto de la aglomeración de basura en su sector para que sea registrado y notificado a las autoridades pertinentes y se pueda visualizar dentro de la aplicación el resultado de si existe o no una aglomeración.
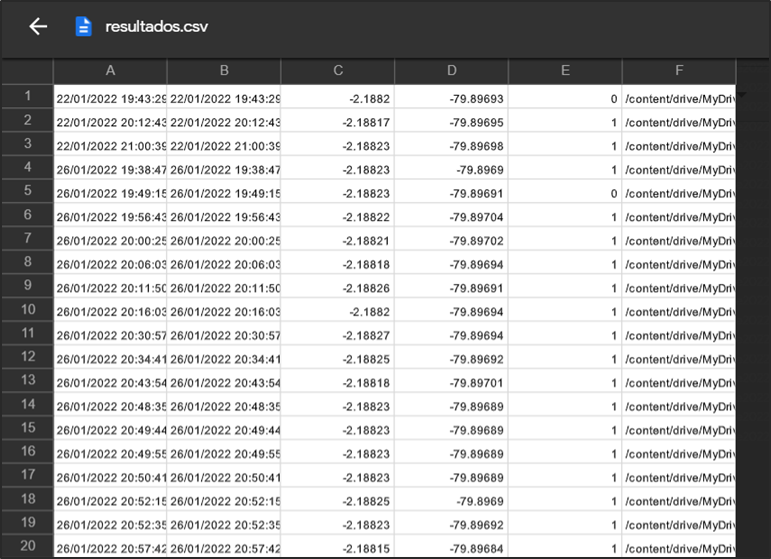
Almacenamiento de datos
Una vez realizada la predicción de la aglomeración de la basura dentro de la aplicación se procede a crear una base de datos a través de la aplicación de Google drive en extensión .csv, en donde se consideran los siguientes parámetros:
– Longitud
– Latitud
– Resultado de la predicción del modelo
– ID de la imagen capturada.
A continuación, se puede observar el archivo final generado con todos los datos que ha recolectado:
Funcionamiento de la interfaz
Herramienta BI
De acuerdo a los resultados que genera el modelo y los datos que guarda la aplicación web. Hemos considerado por uso en el mercado, la facilidad de uso, mejor visualización de objetos y desarrollar el tablero en Power BI.
Power BI es una herramienta que se utiliza principalmente para crear cuadros de mando que facilitan la toma de decisiones.
La información se puede actualizar de manera automatizada o manual y permite la compartición de los informes mediante la propia herramienta.
Por todo lo antes mencionado se procedió en la utilización de dicha herramienta.
Extracción de datos
Una vez que la aplicación web guardó los datos, realizamos los siguientes pasos que muestra la siguiente gráfica.
Figura 20.- pasos de la extracción de datos
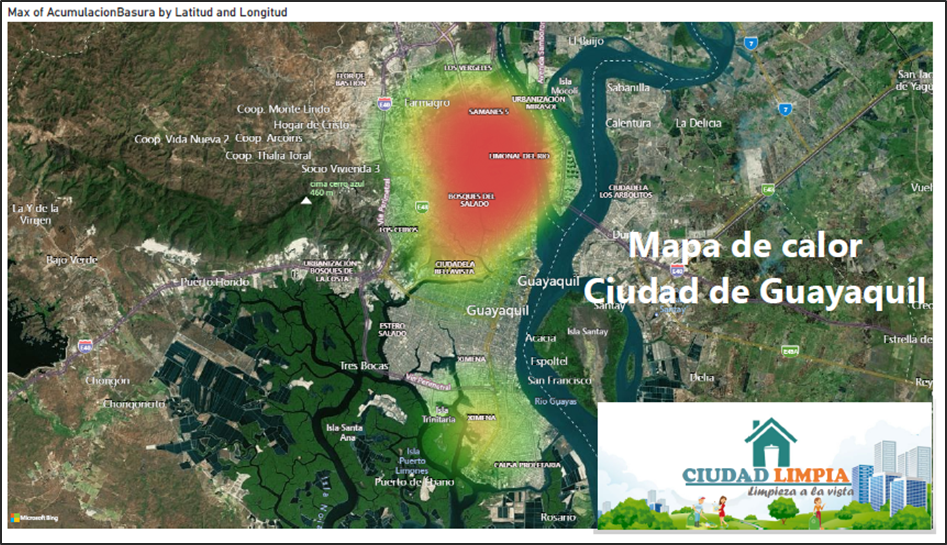
Mediante los campos: latitud, longitud, timestamp, aglomeración (1-Si, 0-No). Creamos un tablero que contenga varios objetos como KPI ‘s, gráficos de barras, gráficos pastel y hasta mapas. Así de manera visual tener una mejor comprensión de los resultados.
Figura 21.- Mapa de calor de la ciudad de Guayaquil
Dicha información nos permite poder identificar a través de un mapa en qué puntos de la ciudad tenemos más aglomeraciones de basura, en qué fechas y día se identificó la mayor cantidad de aglomeración y hacer una mejora en cuanto a la recolección de basura.
Toda la explicación en cuanto a implementación, código, entrenamiento del modelo, uso de interfaz y herramienta BI se puede encontrar en el siguiente link:
La misión de Saturdays.ai es hacer la inteligencia artificial más accesible (#ai4all) mediante cursos y programas intensivos donde se realizan proyectos para el bien (#ai4good).
Si quieres aprender más inteligencia artificial únete a nuestra comunidad en community.saturdays.ai o visítanos en nuestra web www.saturdays.ai ¡te esperamos!